

Improved JPS path optimization method based on Angle-Propagation Theta algorithm
A path optimization and algorithm technology, applied to road network navigators and other directions, to achieve the effects of reduced time consumption, shortened path length, and improved search efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0033]The technical solutions in the embodiments of the present invention will be described clearly and in detail below with reference to the drawings in the embodiments of the present invention. The described embodiments are only some of the embodiments of the invention.
[0034] Such as Image 6 As shown, the JPS path optimization based on Angle-Propagation Theta* includes the following steps:
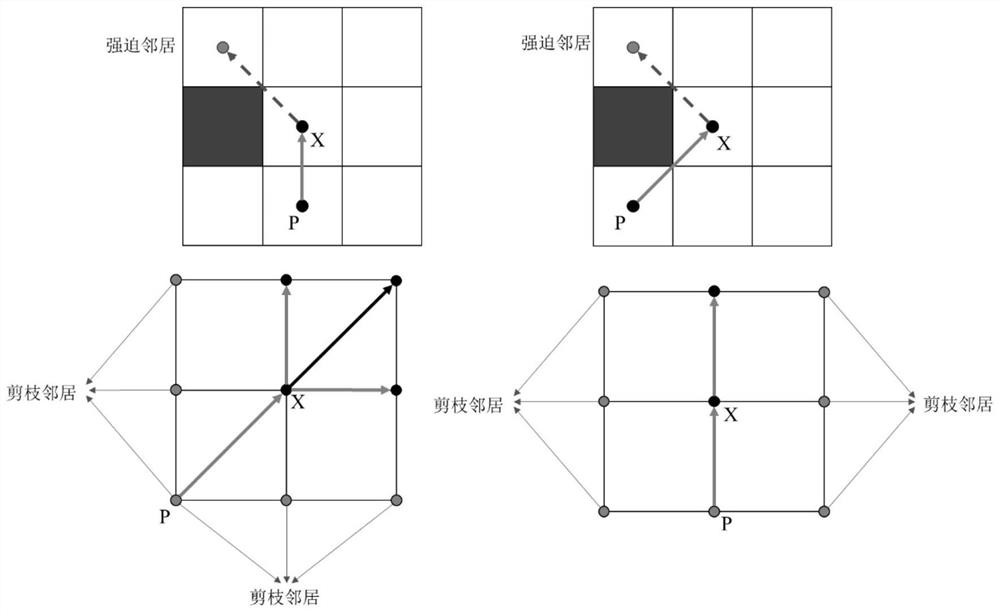
[0035] S1, such as figure 1 As shown, the neighbor pruning rule of the JPS algorithm based on the raster vertex map is:
[0036] S11, if the current node x is the starting point, and the node x does not have a parent node, then there is no neighbor pruning rule, and the search direction is the eight directions of the adjacent nodes.
[0037] S12, the current node x is not the starting node, and the parent node parent(x) of x node to x is the straight line search direction, and n is the neighbor node of x node. If there is a path from parent(x) to n without passing through x, and ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More