

Immersed tube joint deformation real-time monitoring method
A technology of real-time monitoring and pipe joints, which is applied in the direction of measuring devices, instruments, and optical devices, etc., can solve problems such as large movement area, measurement environment, high requirements for station location, and positioning deviation of underwater measurement, so as to reduce safety risks , Guarantee the effect of high-precision docking
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
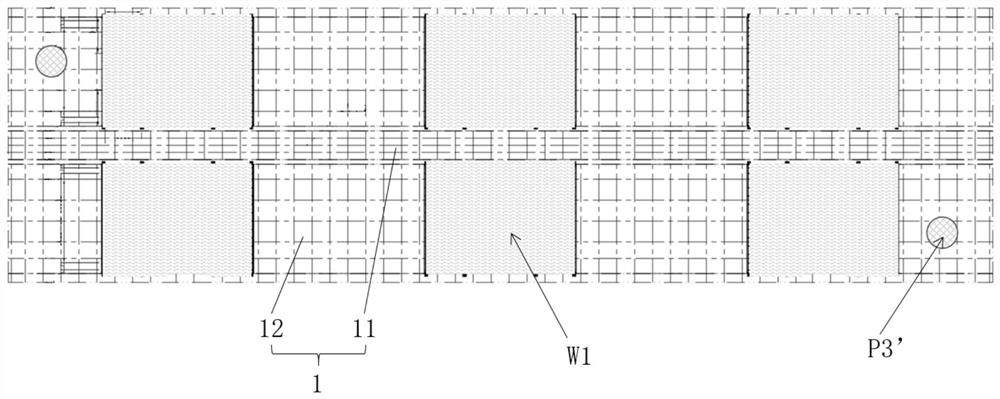
[0038] Embodiment one: if image 3Shown is the layout scheme of the visual measurement system in the middle corridor 11. The visual baseline in the middle corridor 11 is arranged at the bottom of the middle corridor 11 of the immersed tube section 1, and multiple measuring cameras 2 are installed along the length direction of the immersed tube section 1, and the multiple measuring cameras 2 constitute the visual baseline. The visual measurement line array is arranged at the cavity bottom of the middle corridor 11 of the immersed tube section 1, and a plurality of target groups 3 are installed along the length direction of the immersed tube section 1, and the multiple target groups 3 constitute a visual measurement line array.
Embodiment 2
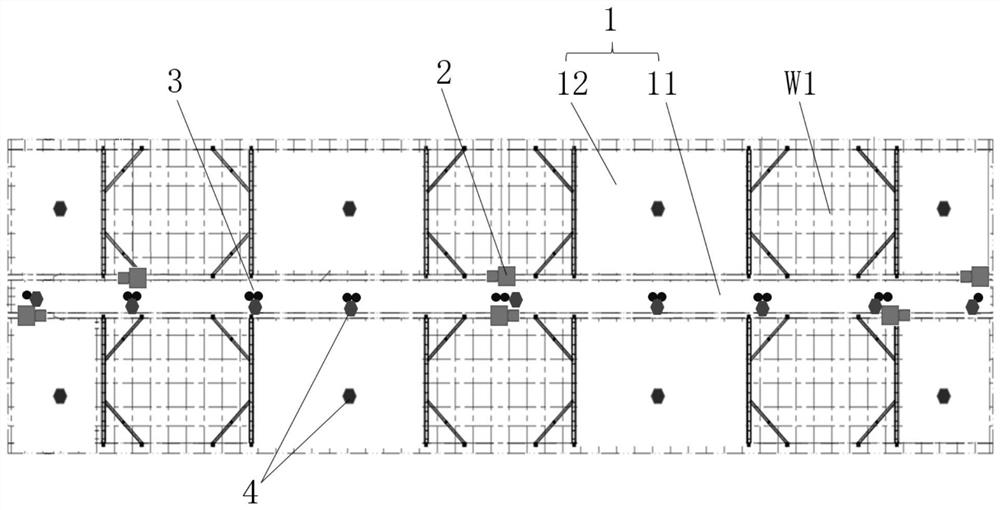
[0039] Embodiment two: if Figure 4 Shown is the layout scheme of the visual measurement system in the tunnel 12. The visual baseline in the tunnel 12 is arranged on the top of each tunnel 12 of the immersed tube section 1, and multiple measuring cameras 2 are installed along the length direction of the immersed tube section 1, and the multiple measuring cameras 2 constitute the visual baseline. The visual measurement line array is arranged on the top of each hole 12 of the immersed tube section 1, and a plurality of target groups 3 are installed along the length direction of the immersed tube section 1, and the multiple target groups 3 constitute a visual measurement line array.
Embodiment 3
[0040] Embodiment 3: Combining the visual measurement system in the middle corridor 11 of Embodiment 1 and the visual measurement system in the tunnel 12 of Embodiment 2, it is the visual measurement in the cavity of the immersed tube in Embodiment 3 System layout plan.
[0041] It can be understood that, in the above three implementations of the vision measurement system, the numbers of the measurement cameras 2 and the target groups 3 are different. The more settings of the visual measurement system, the higher the measurement accuracy will be, but the measurement cost will also increase accordingly, and the measurement cycle will become longer; therefore, those skilled in the art can according to the actual requirements and monitoring costs of real-time monitoring of the deformation of immersed tube joints, etc. Make comprehensive considerations and flexibly set up an applicable visual measurement system.
[0042] The settings of the ranging system, such as image 3 , F...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More