

Puncture template based on optical positioning, auxiliary radiotherapy constant force tracking system realized by applying same, and constant force tracking method
An optical positioning and puncture template technology, which is applied in X-ray/γ-ray/particle irradiation therapy, etc., can solve the problems of uneven weight distribution of 3D printing templates, difficulty in tracking optical balls, and inability to track with constant force. The effect of high force tracking accuracy, easy maintenance and easy operation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
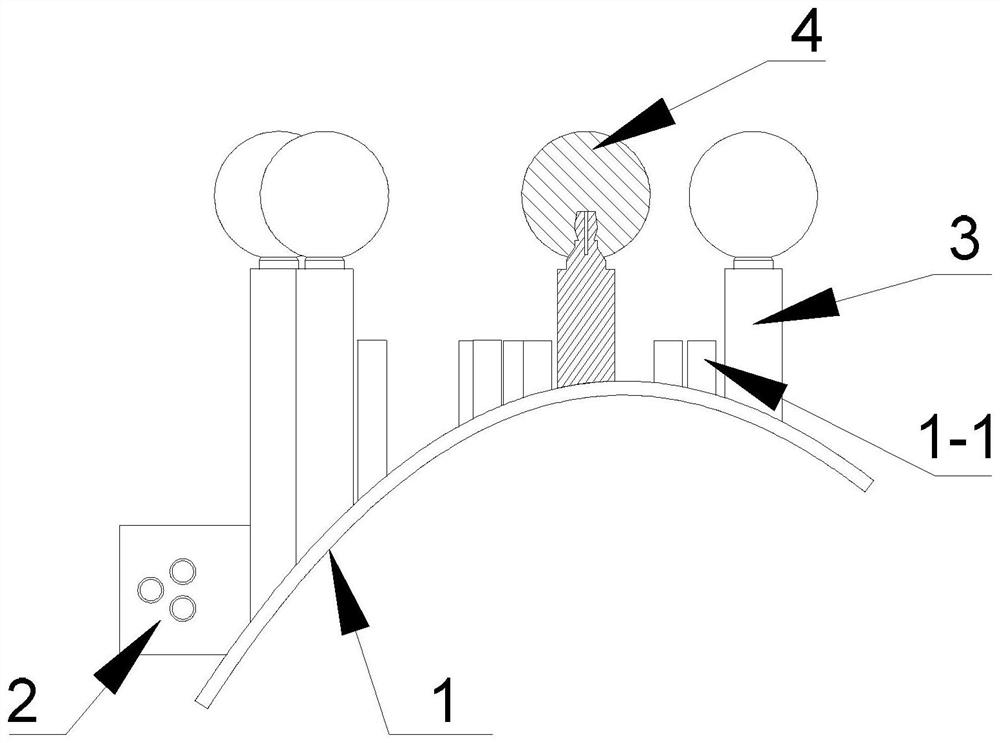
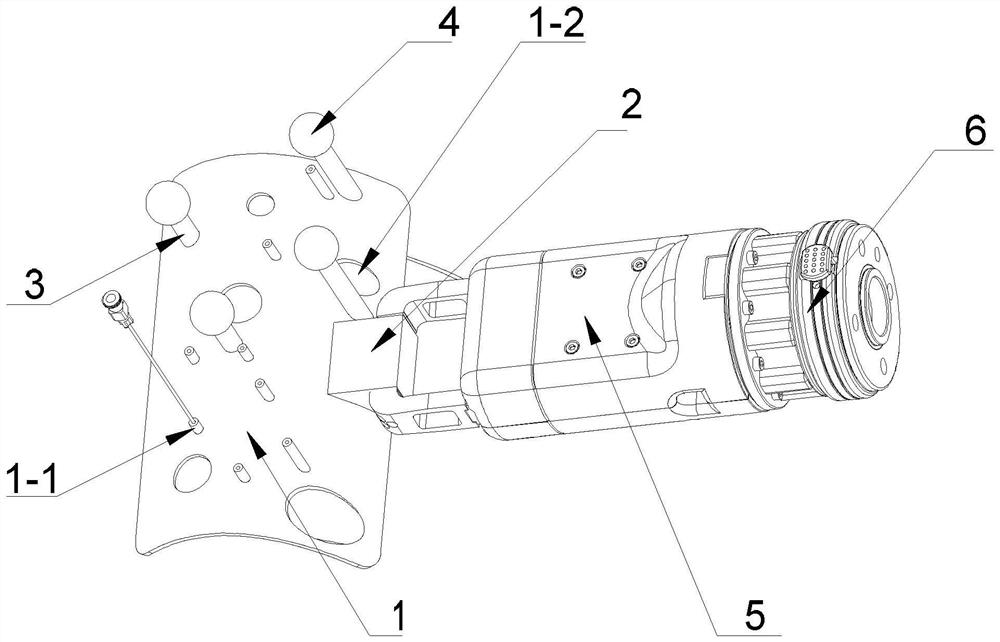
[0029] Specific implementation mode one: the following combination figure 1 with figure 2 Describe this embodiment. The puncture template based on optical positioning described in this embodiment includes a 3D printing template 1 and a clamping connector 2, and also includes N positioning reference columns 3 and N optical balls 4; N is an integer;
[0030] The clamping connector 2 is fixed at the middle part of the lower end of the 3D printing template 1;
[0031] The 3D printing template 1 is a curved surface structure, and a plurality of puncture needle tracks 1-1 are arranged on it;
[0032] N positioning reference columns 3 are fixed on the upper surface of the 3D printing template 1, and an optical ball 4 is fixed on the top of each positioning reference column 3;
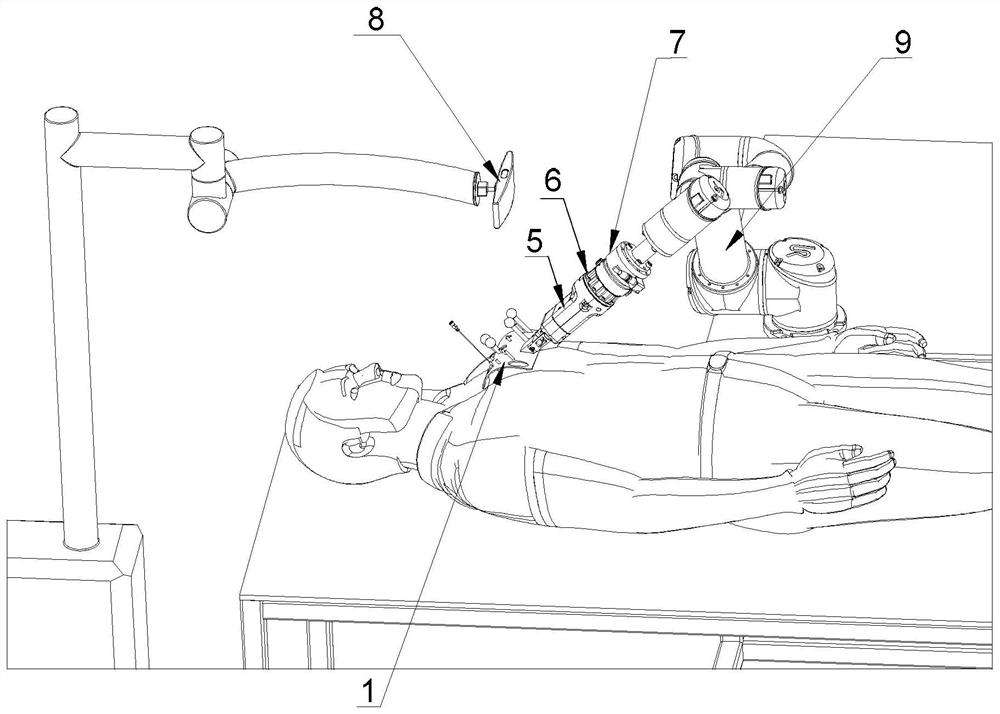
[0033] The middle part of the lower end of the 3D printing template 1 is provided with a clamping connector 2 , and the clamping connector 2 is used for fixed connection with the clamping jaw 5 on the mecha...
specific Embodiment approach 2
[0035] Specific implementation mode two: the following combination figure 1 with figure 2 This embodiment will be described. This embodiment will further describe the first embodiment. The upper surface of the 3D printing template 1 is provided with a plurality of hollow holes 1-2.
[0036] In this preferred embodiment, by adding hollow holes 1-2, the weight of the 3D printing template 1 is further reduced, which is convenient for operation. In a specific application, the sizes of the multiple hollow holes 1-2 are different, and the center of mass of the balanced 3D printing template 1 is at the center of the 3D printing template 1 as a reference.
specific Embodiment approach 3
[0037] Specific implementation mode three: the following combination figure 1 This embodiment will be described. This embodiment will further describe the first embodiment. The top end of the positioning reference column 3 and the optical ball 4 are fixed by plugging.
[0038] In this preferred embodiment, the top end of the positioning reference column 3 and the optical ball 4 are fixed through a plugging connection, so that the structure is simple and the assembly and disassembly are convenient.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More