Warehouse-in and warehouse-out scheduling system based on mobile robot and optimized scheduling method thereof
A mobile robot and dispatching system technology, applied in the direction of comprehensive factory control, comprehensive factory control, electrical program control, etc., can solve the problems of increasing the number of mobile robots, low distribution efficiency, low success rate of single operation and compound operation, etc., to achieve improvement Scheduling level and distribution efficiency, operation simplification, and the effect of reducing the number of configurations
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0065] Below, the present invention will be further described in conjunction with the accompanying drawings and specific implementation methods. It should be noted that, under the premise of not conflicting, the various embodiments described below or the technical features can be combined arbitrarily to form new embodiments. .
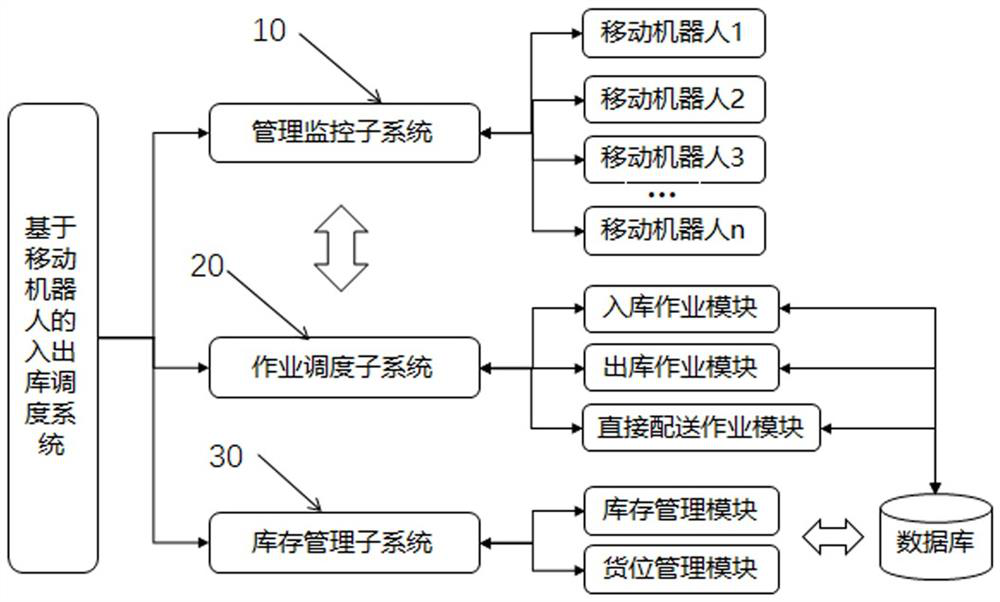
[0066] Such as figure 1 As shown, the present invention also discloses a mobile robot-based inbound and outbound scheduling system, including:
[0067] The job scheduling subsystem 20 is used to generate a scheduling job, and send scheduling job information to the management and monitoring subsystem 10; wherein, the scheduling job information includes job type, transport object attribute information, starting location and target location; The types are divided into outbound type, inbound type, and direct delivery type;
[0068] The management and monitoring subsystem 10 is configured to communicate with the job scheduling subsystem 20 via Ethernet an...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com