Lane line detection method based on cross-layer optimization
A technology for lane line detection and cross-layer optimization, applied in the field of computer vision, can solve the problem of low detection accuracy, and achieve the effect of improving detection accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
[0033] The present invention will be further elaborated and illustrated below in conjunction with the accompanying drawings and specific embodiments.
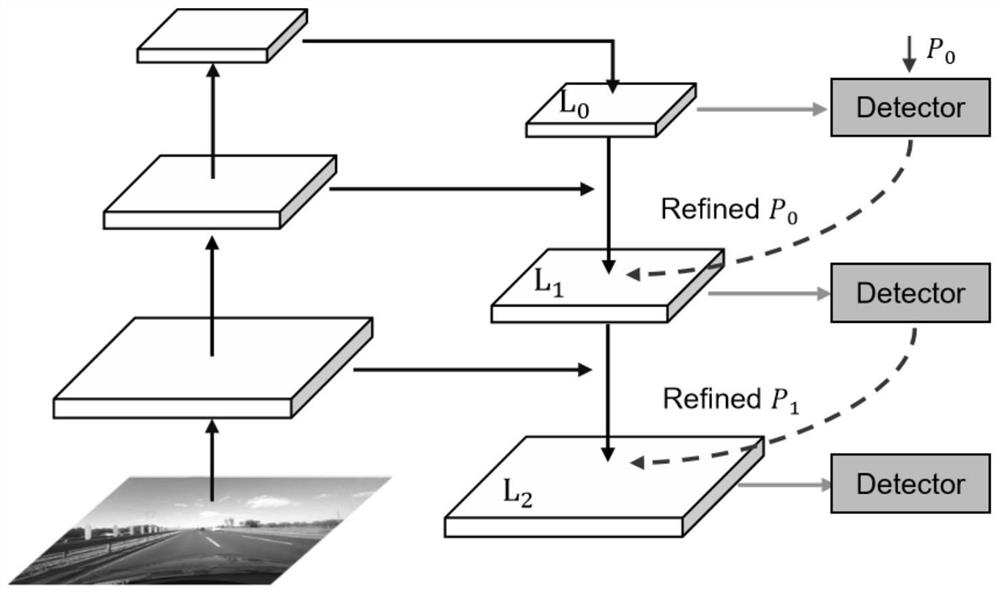
[0034] Such as figure 1 As shown, the embodiments of the present invention include the following:
[0035] (1) Input the road picture and use the convolutional neural network to extract the pyramid level feature map in the road picture;
[0036] In step (1), the convolutional neural network includes multiple convolution modules. The input road picture is processed by multiple convolution modules in succession, and then the results processed by adjacent different convolution modules are transferred and superimposed to obtain multiple pyramids. Hierarchical feature maps.
[0037] Specifically, the convolutional neural network processes the input road picture through three consecutive convolution modules, and obtains a backbone feature map after each convolution module processing, and obtains high-level and middle-level images ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com