Autonomous obstacle crossing robot with reconfigurable wheel claws
An autonomous, robotic technology, applied in the direction of wheels, motor vehicles, power units, etc., can solve the problems of complex and incomplete structure of the wheel shaft, and the influence of the strength of key components, and achieve the effect of excellent obstacle surmounting ability and simple and compact structure.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
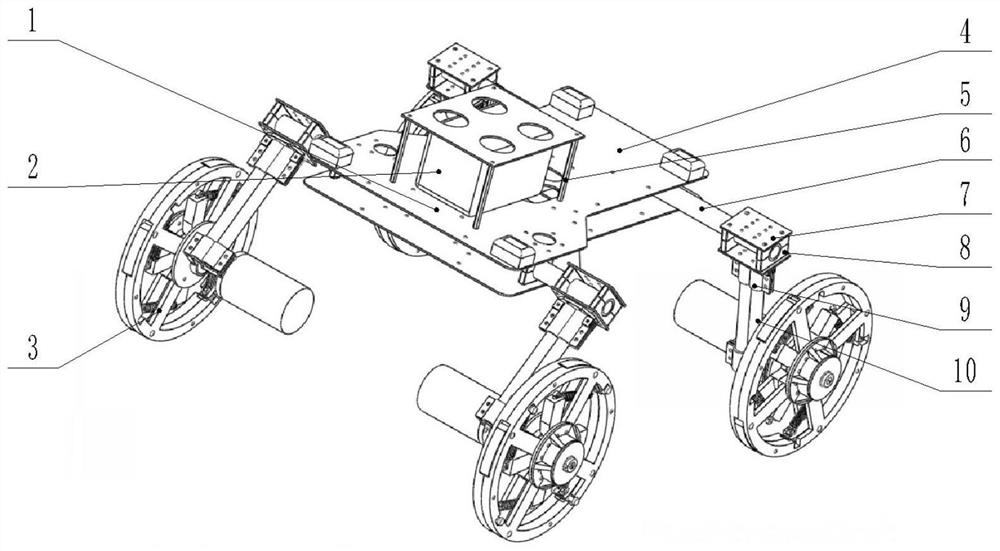
[0018] An autonomous wheel-claw reconfigurable obstacle-climbing robot, which adopts wheel mode when traveling on a flat road, and switches to claw mode autonomously when there are obstacles, and realizes wheel mode and claw mode through autonomous wheel-claw reconfigurable wheels switch.
[0019] like figure 1 As shown, an autonomous reconfigurable claw wheel robot includes a body 1, an autonomous reconfigurable claw wheel 2 arranged on the body 1, and an electronic device 3, which is used to control Signal and control robot movement.
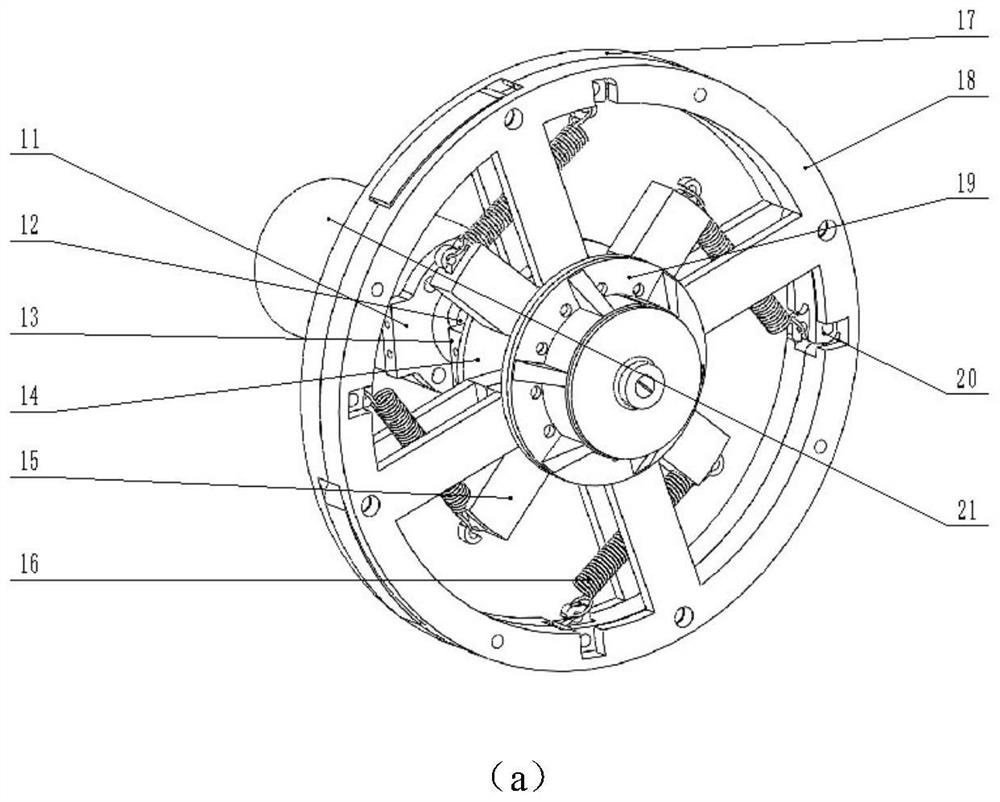
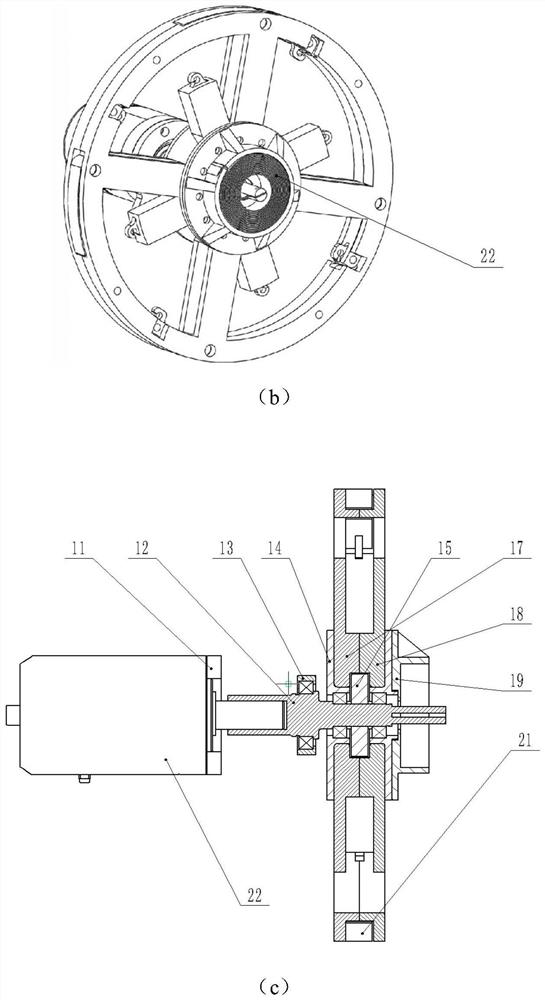
[0020] The autonomous reconfigurable claw wheel 2 includes a motor 21 , a wheel shaft 12 , a crank 15 , a tension spring 16 , an outer hub 17 , an inner hub 18 , claws 20 , a motor 21 and a planar scroll spring 22 . The output shaft of the motor 21 is connected to one end of the wheel shaft 12, the outer wheel hub 17 and the inner wheel hub 18 are all arranged on the wheel shaft 12, the pawl 20 is arranged between the outer wheel hub 17 and ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com