

GMSL camera time synchronization control method for automatic driving
A time synchronization, automatic driving technology, applied in multiplex communication, color TV parts, TV system parts and other directions, can solve the problems of signal loss, hidden danger of driving, small difference in trigger time, etc., to achieve effective The effect of time shift
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
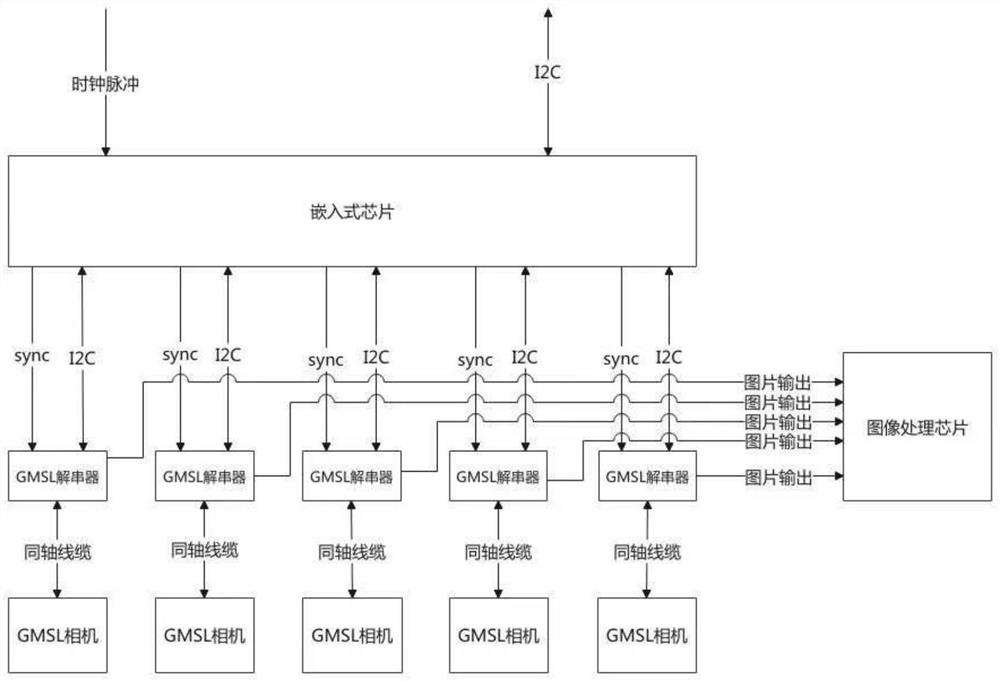
[0032] Such as figure 1 As shown, the multi-channel GMSL camera is connected to the GMSL deserializer through a coaxial cable, and the GMSL deserializer is connected to the microcontroller through the I2C bus, and the embedded chip can send sync to the GMSL deserializer unidirectionally through the GPIO signal signal to ensure precise time synchronization.
[0033] When synchronization is required, the user can input clock pulses to the embedded chip to provide a reference synchronization signal, and at the same time provide clock configuration information to the embedded chip through the I2C data bus. Through the clock configuration information, the embedded chip can control the GPIO to download to the GMSL deserializer. Send the sync signal and send the control sequence to the deserializer through I2C.
[0034] Then control the image output frequency and output timing of the GMSL camera through the coaxial cable, and finally achieve the synchronization between the camera im...
Embodiment 2
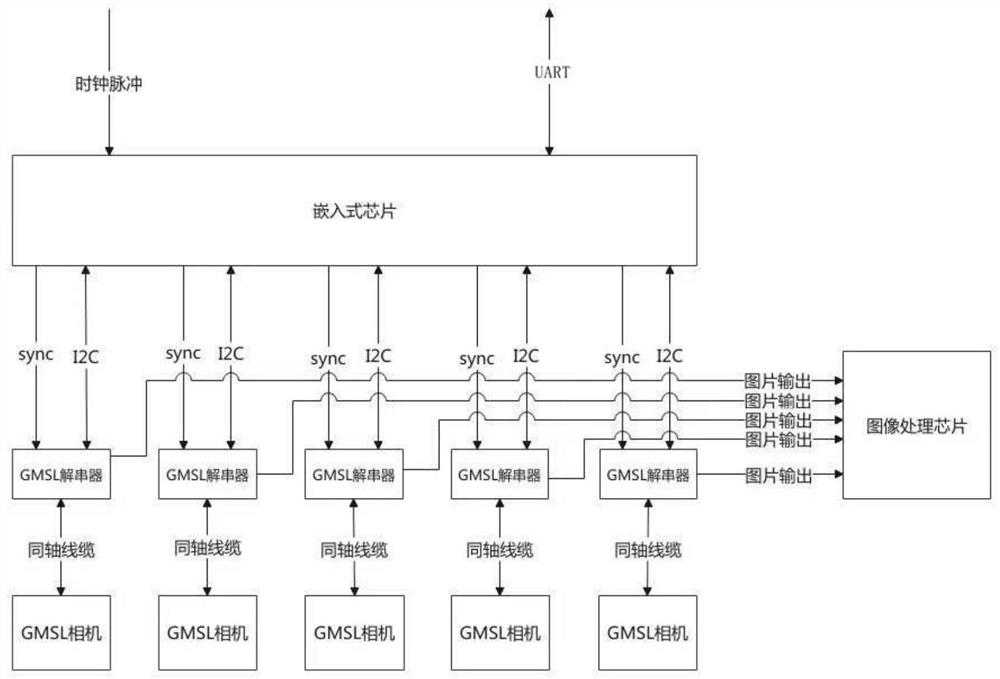
[0040] Such as figure 2 As shown, the clock configuration information is provided to the embedded chip through the UART data bus, and the other parts are the same as in the first embodiment.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More