

A forklift gantry joint action control method and control system
A joint action, forklift gantry technology, applied in the direction of fluid pressure actuation system components, fluid pressure actuation devices, lifting devices, etc., can solve the problems of pump flow saturation, compensator vibration, system flow distribution, etc., to avoid pump flow Flow saturation issues, improved life and reliability, reduced vibration and noise effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0040] The technical solutions in the embodiments of the present invention will be clearly and completely described below with reference to the accompanying drawings in the embodiments of the present invention. Obviously, the described embodiments are only a part of the embodiments of the present invention, but not all of the embodiments. Based on the embodiments of the present invention, all other embodiments obtained by those of ordinary skill in the art without creative efforts shall fall within the protection scope of the present invention.
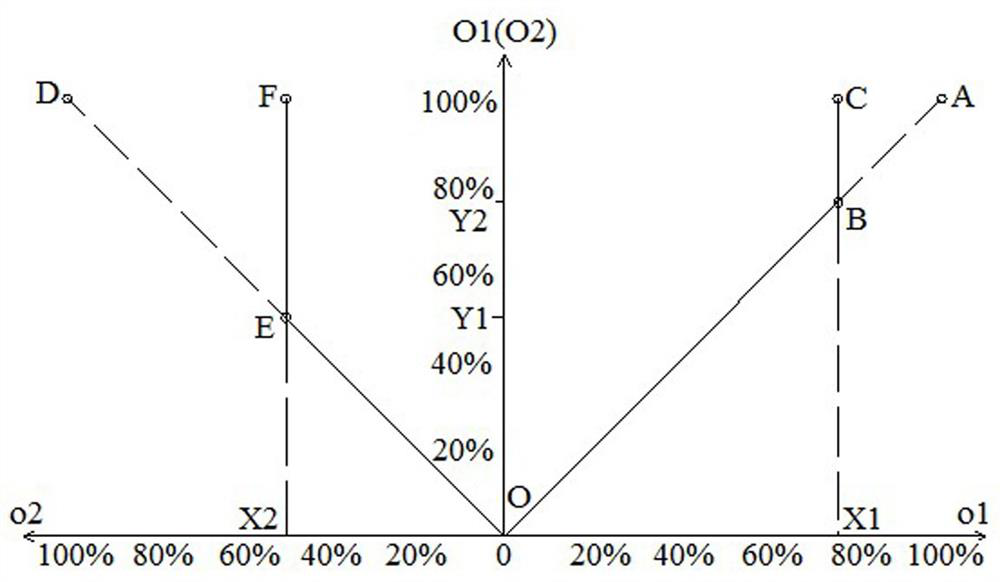
[0041] The core of the present invention is to provide a method for controlling the joint action of a forklift gantry, which can prevent the total flow required by the actions of multiple actuators from exceeding the maximum flow that the oil pump can provide, avoid the problem of pump flow saturation, and ensure the performance of the main action. .
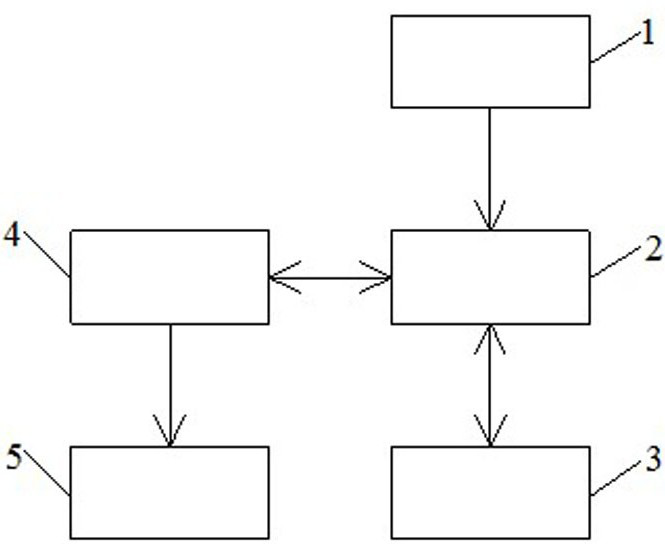
[0042] In addition, the present invention also provides a forklift gantry joint act...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More