

Unmanned cluster evolution system and method based on meta-action sequence reinforcement learning
A reinforcement learning, meta-action technology, applied in control/regulation systems, combustion engines, non-electric variable control, etc., can solve problems such as difficulty in building an unmanned swarm decision-making model, poor environmental adaptability, and lack of evolutionary ability, to promote The effect of transformation, strong generalization ability, and overcoming construction difficulties
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0032] The present invention will be described in further detail below in conjunction with the accompanying drawings.
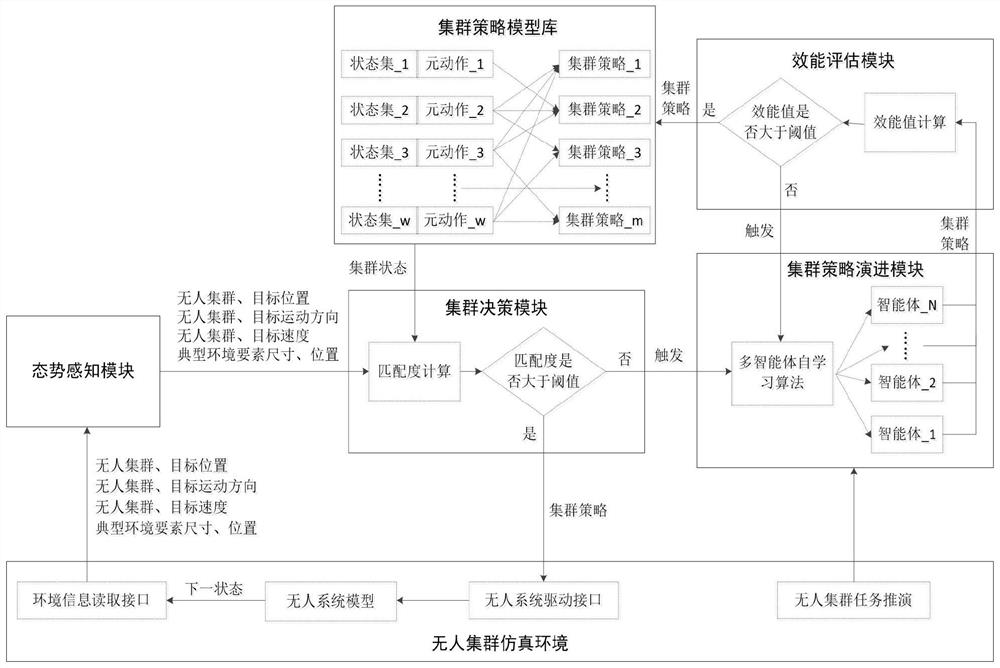
[0033] An unmanned swarm evolution system based on meta-action sequence reinforcement learning, including six main components: unmanned swarm simulation environment, swarm strategy model library, effectiveness evaluation module, situation awareness module, swarm strategy evolution module and swarm decision-making module. Some functions are described as follows:
[0034] Unmanned swarm simulation environment: Provide models of various types of unmanned systems such as drones, unmanned vehicles, and unmanned ships, and can import multiple types of 3D environment models, and provide unmanned system drivers and environmental information reading interfaces to support unmanned Simulation and deduction of intelligent algorithms such as swarm cooperative flight, unmanned swarm mission planning, and deep reinforcement learning.
[0035] Swarm strategy model library: ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More