Stacking surface prediction method based on mine field environment perception
A technology of environmental perception and prediction method, applied in the field of environmental perception and intelligent excavator research, it can solve the problems of large equipment size, staying in two-dimensional level, computing and other problems
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0049] Below in conjunction with accompanying drawing, the present invention is described in more detail:
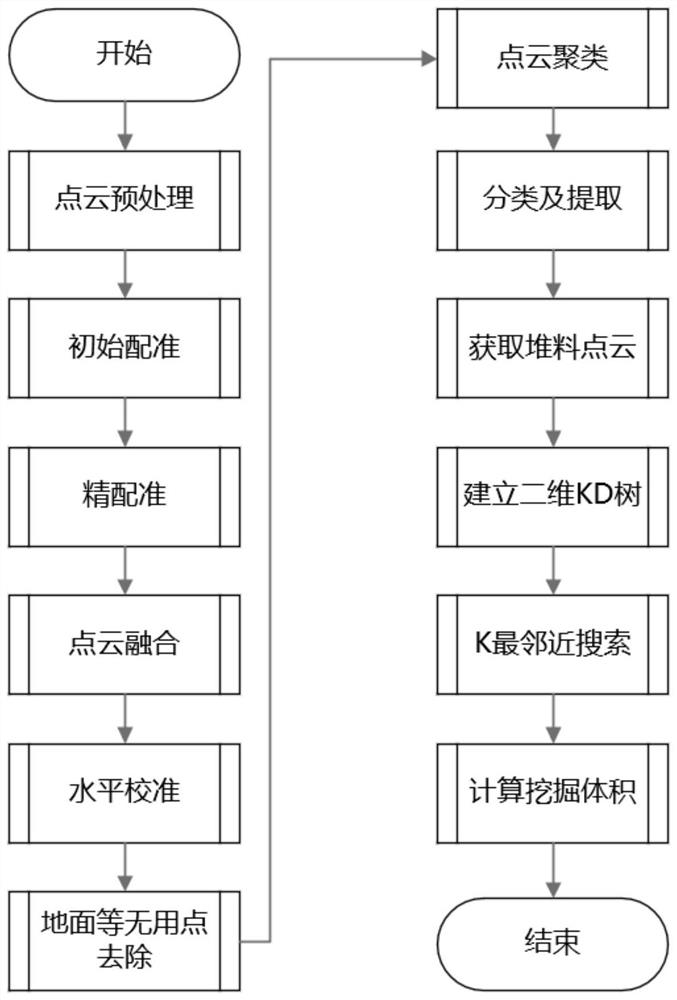
[0050] like figure 1 As shown in the figure, the method for predicting the stacking surface based on the perception of the mine environment designed by the present invention includes point cloud preprocessing, registration, fusion, horizontal calibration, useless point removal on the ground and above the stacking material, clustering, classification and extraction, and acquisition. Stacking point cloud, dimensional KD tree establishment, K nearest search material point to establish the prediction model of the stacking surface and calculate the excavation volume. The specific implementation steps of the method are as follows:
[0051] A. Use the 3D lidar installed in two different positions on the electric shovel experimental platform to scan the mine environment and read key data such as point cloud coordinates;
[0052] B. Perform point cloud preprocessing on the sour...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More