

Non-singular terminal sliding mode anti-shaking control method in vertical lifting process of slender load
A non-singular terminal and control method technology, which is applied in the field of non-singular terminal sliding mode anti-shake control, can solve difficult measurement and application problems, achieve the effects of convenient application, wide application range, and improved work efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0015] In order to make the objectives, technical solutions and advantages of the present invention clearer, the present invention will be further described in detail below with reference to the accompanying drawings and embodiments. It should be understood that the specific embodiments described herein are only used to explain the present invention, but not to limit the present invention. In addition, the technical features involved in the various embodiments of the present invention described below can be combined with each other as long as there is no conflict with each other.
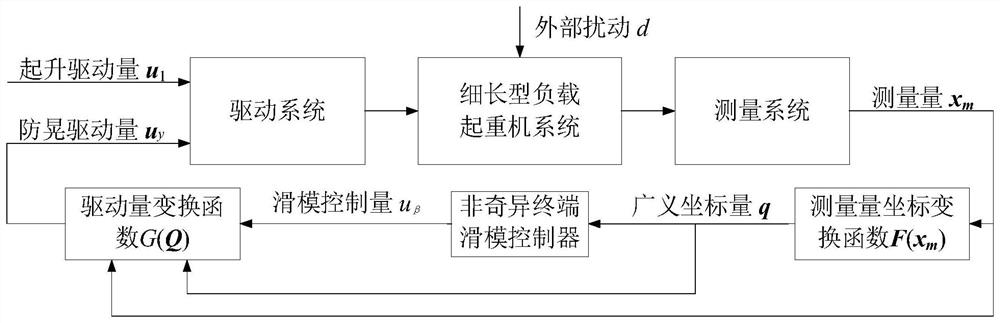
[0016] The control principle of the present invention is as follows figure 1 As shown, when the slender load crane is subjected to external disturbance d and the load shakes, the measurement coordinate transformation function F(x m ) will measure the quantity x m Converted to the generalized coordinate quantity q; then, the non-singular terminal sliding mode controller uses the generalized coordin...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More