Unmanned aerial vehicle flight control strategy design method using gust environment
A technology of flight control and design method, applied in control/adjustment system, non-electric variable control, three-dimensional position/course control, etc., can solve problems such as unsatisfactory effect and difficult debugging, improve training accuracy and efficiency, and avoid debugging The process is complicated and the effect of optimized design
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
Based on the above-mentioned specific embodiments of the present invention, a flight control method design for a certain type of unmanned aerial vehicle using a gust environment, specifically including:
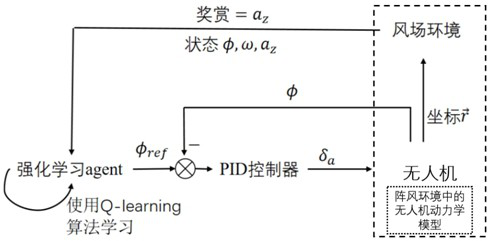
In a gust environment with an updraft area, a UAV flight dynamics model considering the gust environment is established. The UAV starts to fly straight and level from a height of 300m, and the aircraft heading is random. The starting point of the aircraft is at (0,0) in the top-down plane, and the center of the updraft is at (1000,1000). used in training e -greedy strategy to e takes the optimal action with probability 1- e The probability of adopting a random strategy is close to the updraft. 3600s per training. After the training converges, a greedy strategy is used to select the optimal action.
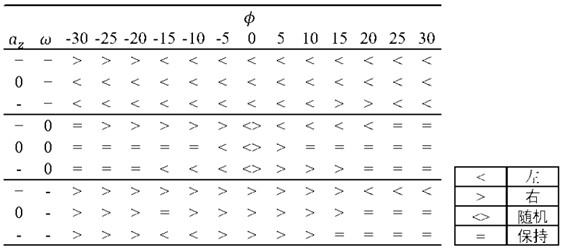
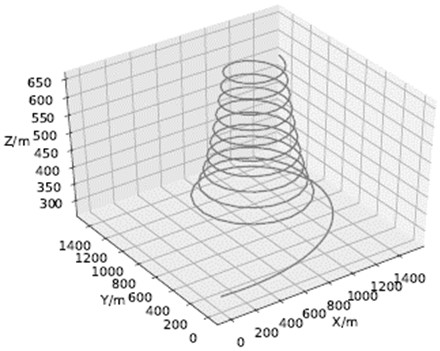
[0041] The control strategy after convergence is as follows figure 2 shown. Under the condition of no rolling torque and vertical wind speed gradient, the UAV will tend to m...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More