

Three-dimensional point cloud classification method fusing persistent coherence
A technology of 3D point cloud and classification method, which is applied in the field of computer vision, can solve problems such as difficulty in improving accuracy and lack of topological features of point cloud, and achieve a high accuracy rate
Pending Publication Date: 2022-06-03
ZHONGBEI UNIV
View PDF0 Cites 0 Cited by
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
[0004] Aiming at the problem that the existing 3D point cloud classification method lacks point cloud topological features so that the accuracy is difficult to improve, the present invention proposes a 3D point cloud classification method that integrates persistent homology
Method used
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
View moreImage
Smart Image Click on the blue labels to locate them in the text.
Smart ImageViewing Examples

Examples
Experimental program
Comparison scheme
Effect test
Embodiment 1
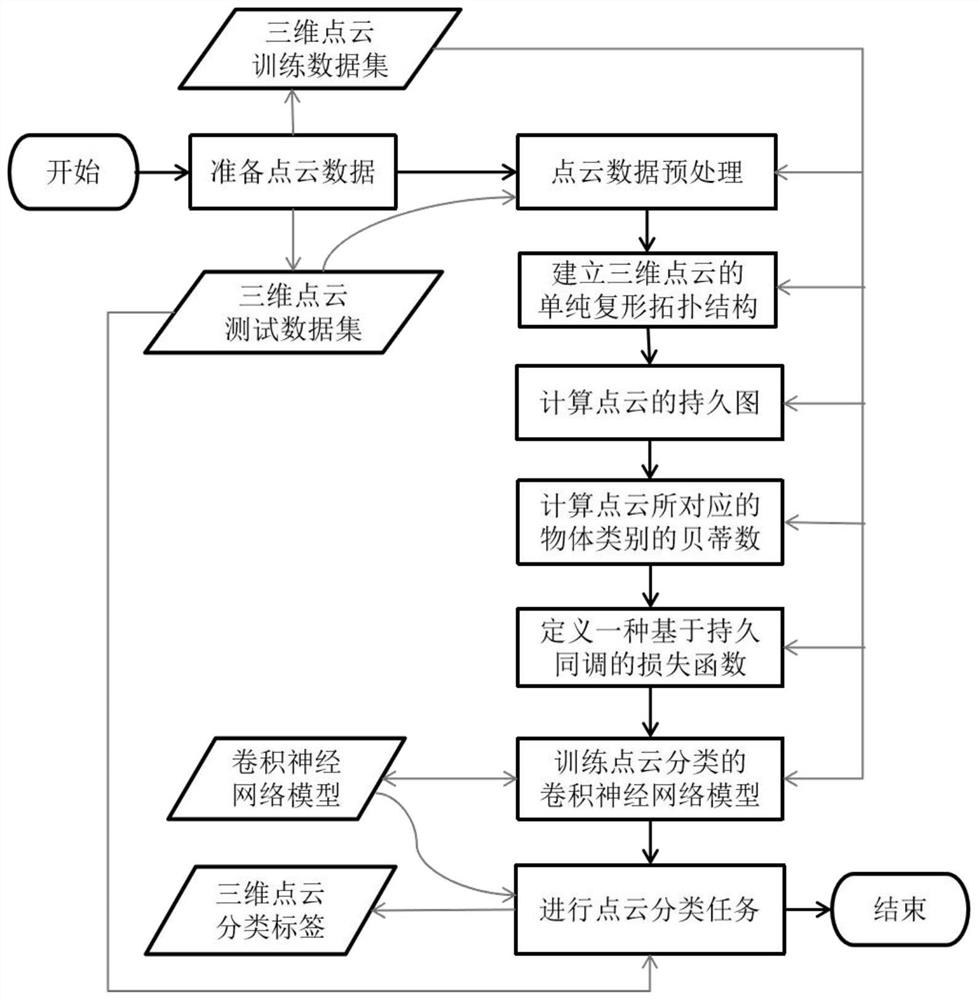
[0043] like figure 1 As shown, a method for classifying 3D point clouds with persistent coherence fusion in this embodiment includes the following steps:
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More PUM
 Login to View More
Login to View More Abstract
The invention belongs to the technical field of computer vision, particularly relates to a three-dimensional point cloud classification method fusing persistent coherence, and aims to solve the problem that point cloud topological features are not represented in the current three-dimensional point cloud classification technology. And further introducing a persistent coherence method in algebraic topology to carry out point cloud classification. The method comprises the following steps: firstly, constructing a point cloud witness simple complex topological structure, and quantifying the persistent coherent topological features of the point cloud from two aspects of Betti number and persistent graph; secondly, defining a loss function based on persistent coherence, and performing training learning on the three-dimensional point cloud classification network model according to the loss function to obtain various parameters of the neural network model; and finally, performing a classification task of the three-dimensional point cloud by using the trained convolutional neural network. Test results show that the point cloud classification accuracy is remarkably improved.
Description
technical field [0001] The invention belongs to the technical field of computer vision, and in particular relates to a three-dimensional point cloud classification method integrating persistent coherence, which is suitable for classifying three-dimensional point clouds. Background technique [0002] With the popularization of 3D scanning equipment such as lidar and depth cameras, the collection of 3D point cloud data is becoming more and more convenient. How to distinguish these point cloud data is a key problem to be solved in the fields of automatic driving, intelligent robot navigation, scene reconstruction, and virtual reality. . 3D point cloud classification refers to classifying point clouds into different point cloud sets, the same point cloud set has similar or the same attributes, and marking the classified point cloud sets with labels, so as to obtain the category of each point cloud set. Traditionally, machine learning methods are generally used for point cloud c...
Claims
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More Application Information
Patent Timeline
 Login to View More
Login to View More IPC IPC(8): G06V10/764G06V10/82G06K9/62G06N3/04G06N3/08G01S13/86
CPCG01S13/867G06N3/08G06N3/045G06F18/241
Inventor况立群万嘉龙熊风光韩慧妍杨晓文张元韩燮庞敏薛红新王爽孙福盛郭磊
OwnerZHONGBEI UNIV