Automatic material shoveling control method of loading machine
A control method and loader technology, which are applied in mechanically driven excavators/dredgers, earth movers/shovels, construction, etc., to achieve the effects of high comprehensive operation efficiency, high shovel full rate, and overflow prevention.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
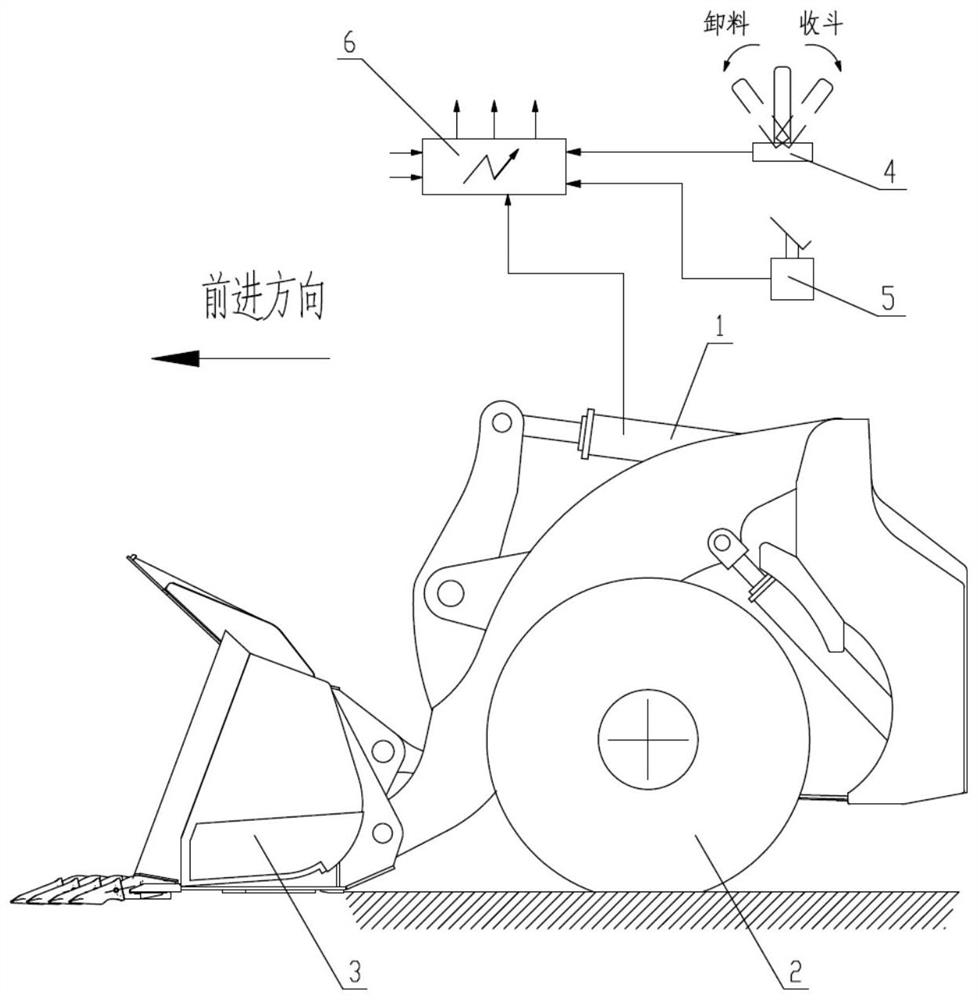
[0030] When the bucket 3 is leveled and enters the stockpile, the controller 6 adjusts the engine to run at a speed corresponding to the maximum torque point. That is to say, the controller 6 can adjust the engine to the working state of the maximum torque point according to the shoveling state of the bucket 3, that is, the speed is the speed corresponding to the maximum torque point, figure 2 It is a schematic diagram of the structure of the bucket 3 on the loader when it is leveled. It can be seen from the figure that the bucket 3 is placed on the ground, the pedal 5 (throttle) can control the walking system 2 through the controller 6, and the handle 4 can be controlled through the controller 6. The bucket 3 is leveled by controlling the bucket cylinder 1 .
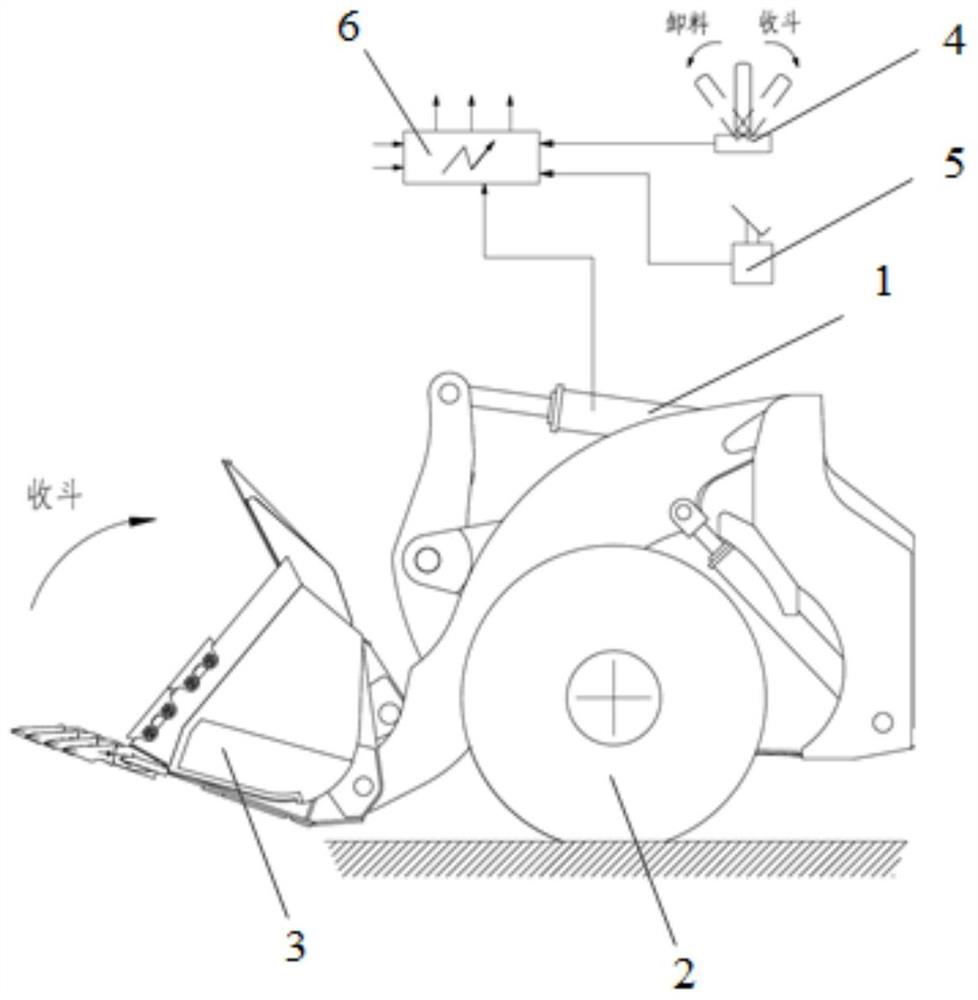
[0031]When the sum of the current bucket closing pressure value P1 and the previous bucket closing pressure gradient △ is less than the set pressure P, that is, P1+△
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More