Mobile robot path planning method based on hybrid strategy
A mobile robot and mixed strategy technology, applied to road network navigators and other directions, can solve the problems of long search time, increased path length, and many turning times, and achieve the effect of removing redundant nodes, increasing path length, and reducing turning times
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0039] Below in conjunction with accompanying drawing and embodiment, the patent of the present invention is further described:
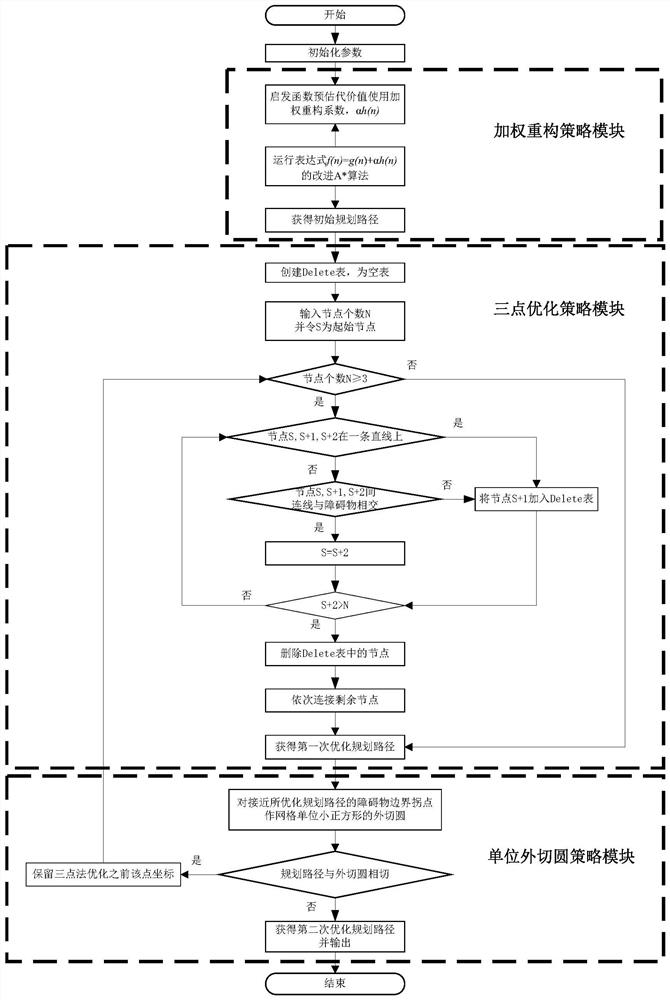
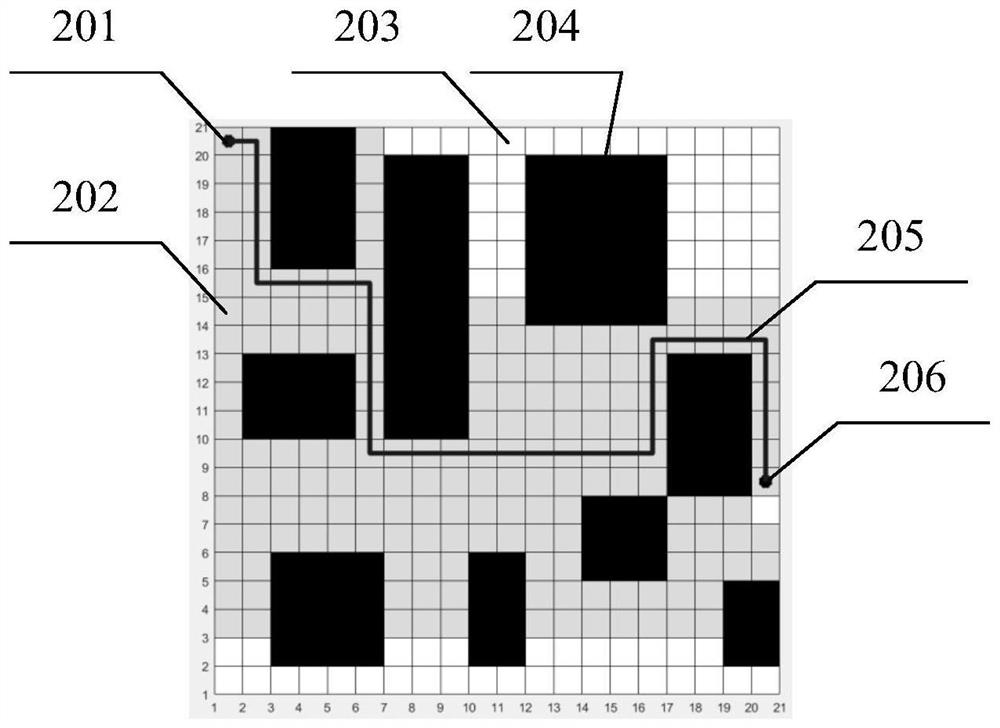
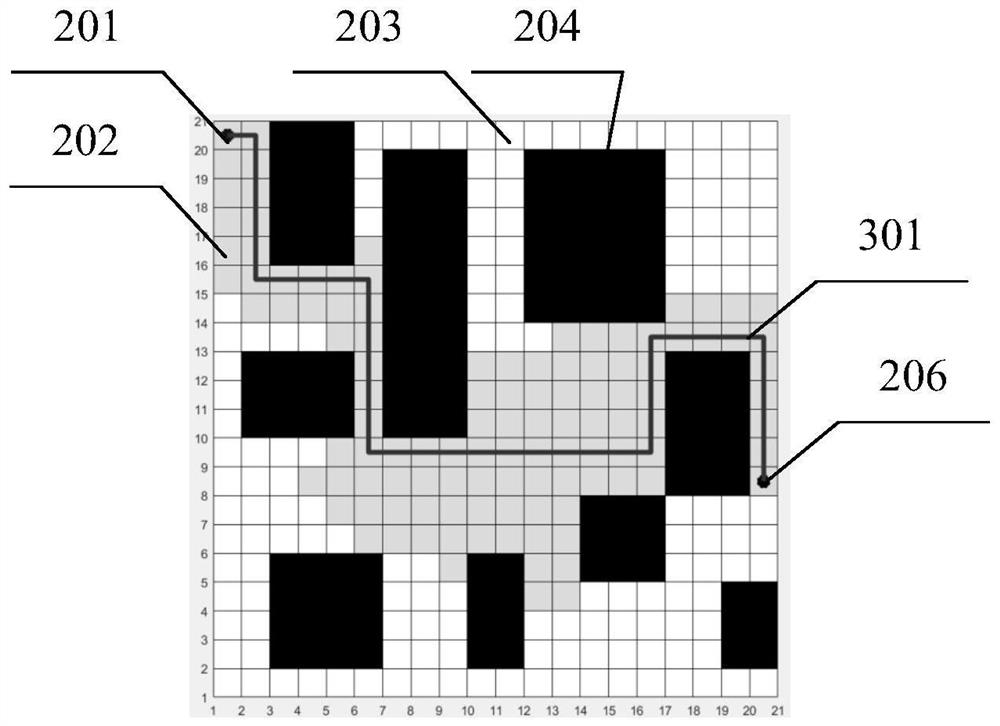
[0040] A hybrid strategy-based mobile robot path planning method provided by the present invention includes a starting point 201, a light gray unit small square 202; a white unit small square 203, a black rectangle 204, a black polyline 1 205, a target point 206, and a black polyline Two 301, black polyline three 401, black polyline four 501, original A* algorithm, hybrid strategy, weighted reconstruction strategy module, three-point optimization strategy module, unit circumscribed circle strategy module, original A* algorithm planning path, original A* The length of the algorithm planning path, the area of the search area of the original A* algorithm planning path, the number of nodes in the original A* algorithm planning path, the initial planning path, the first optimization planning path, the second optimization planning path, the second opti...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com