Grabbing force self-balancing adaptive tomato picking manipulator
A self-balancing, grasping force technology, applied in the field of manipulators, can solve the problems of affecting tomato picking efficiency and picking quality, low work efficiency, high picking cost, etc., to improve the success rate of grasping, not easy to damage, and the movement connection part is simple Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0025] The present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments.
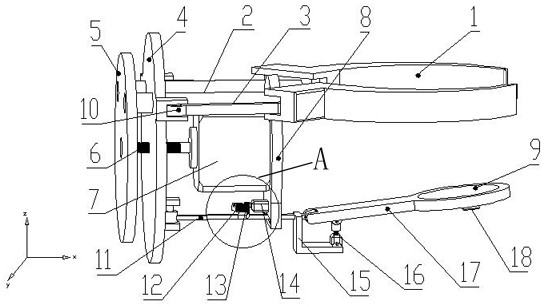
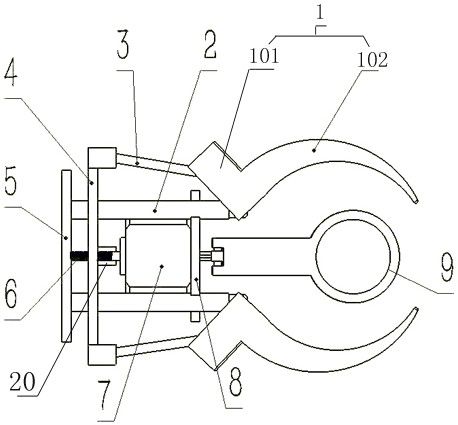
[0026] As shown in the figure, a tomato picking manipulator with self-balancing adaptive gripping force includes a gripper component, a support component, a power component for driving the action of the gripper component, and a self-balancing support for assisting the gripper component to adjust the position of the tomato Lift components.
[0027] In this embodiment, the gripper assembly includes two clamping jaws 1 , two connecting rods 3 and a fixing seat 4 , and each clamping jaw includes a connecting arm 101 and a clamping jaw body 102 disposed at one end of the connecting arm 101 ; One end of the connecting arm 102 is hinged with the fixing base 4 through the respective connecting rods 3 .
[0028] Specifically, the connecting rod 3 and the fixed seat are hinged through the hinge shaft 10 . The specific hinge method is in the prior art,...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More