

Single-ball balance robot attitude self-balance control method
A control method and robot technology, applied in attitude control and other directions, can solve problems such as dynamic instability and inflexible movement, and achieve the effect of reducing workload and expanding the scope of application
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach
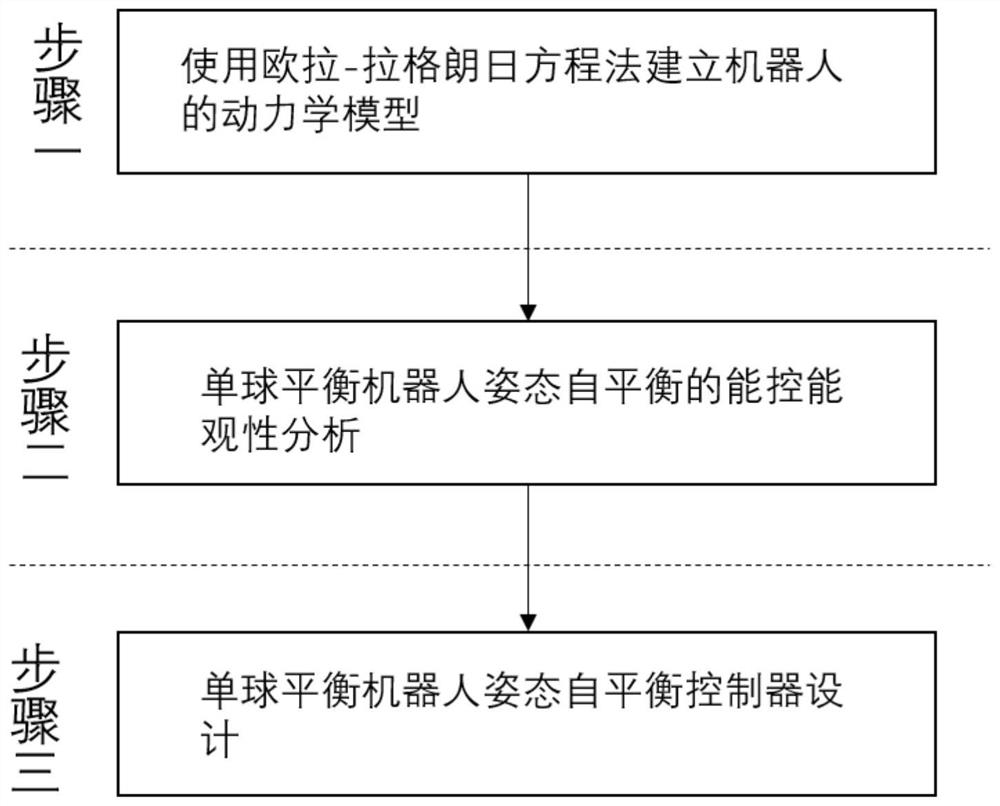
[0122] Step 1: Use the Euler-Lagrange equation method to establish the dynamic model of the robot;
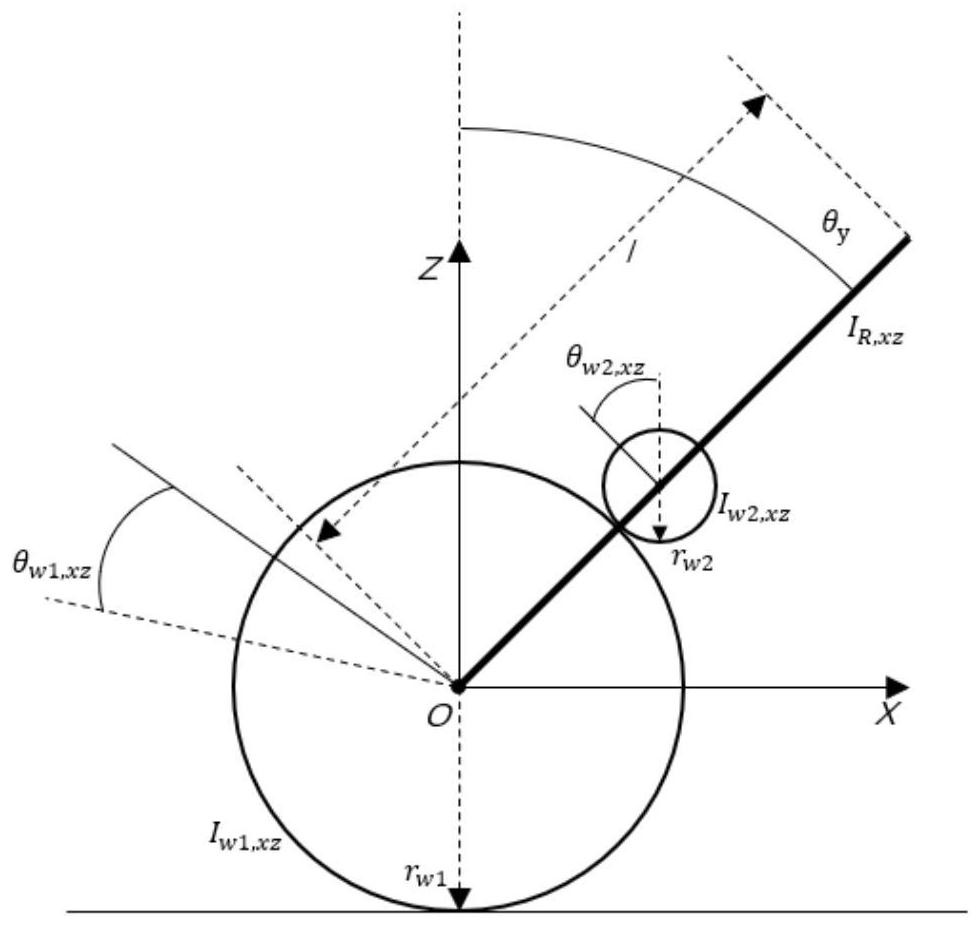
[0123] (1) Solve the kinetic energy and potential energy of the robot dynamic system as a whole in the coordinate system
[0124] The total kinetic energy of the robot in the XOZ plane is K xz =K R,xz +K w1,xz +K w2,xz , where the kinetic energy of the robot body is
[0125]
[0126]
[0127] The kinetic energy of the spherical wheel is
[0128]
[0129]
[0130] The virtual wheel kinetic energy is
[0131]
[0132]
[0133] The total potential energy of the robot in the XOZ plane is P xz =P R,xz +P w1,xz +P w2,xz , where the potential energy of the robot body is:
[0134] P R,xz =m R gl cosθ y
[0135] Spherical wheel potential energy P w1,xz is 0
[0136] The virtual wheel potential energy is
[0137] P w2,xz =m w2 gl cosθ y
[0138] (2) Solve all the external torques in the robot dynamic system:
[0139] The robot only receives the torqu...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More