

Multi-sensor cooperative tracking method based on Renyi information increment
A multi-sensor and sensor technology, applied in the field of multi-sensor management, can solve the problems of affecting the target tracking effect, lack of flexibility and universality, and achieve the effect of enhancing anti-interference ability, reducing total radiation power, and realizing radio frequency stealth
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
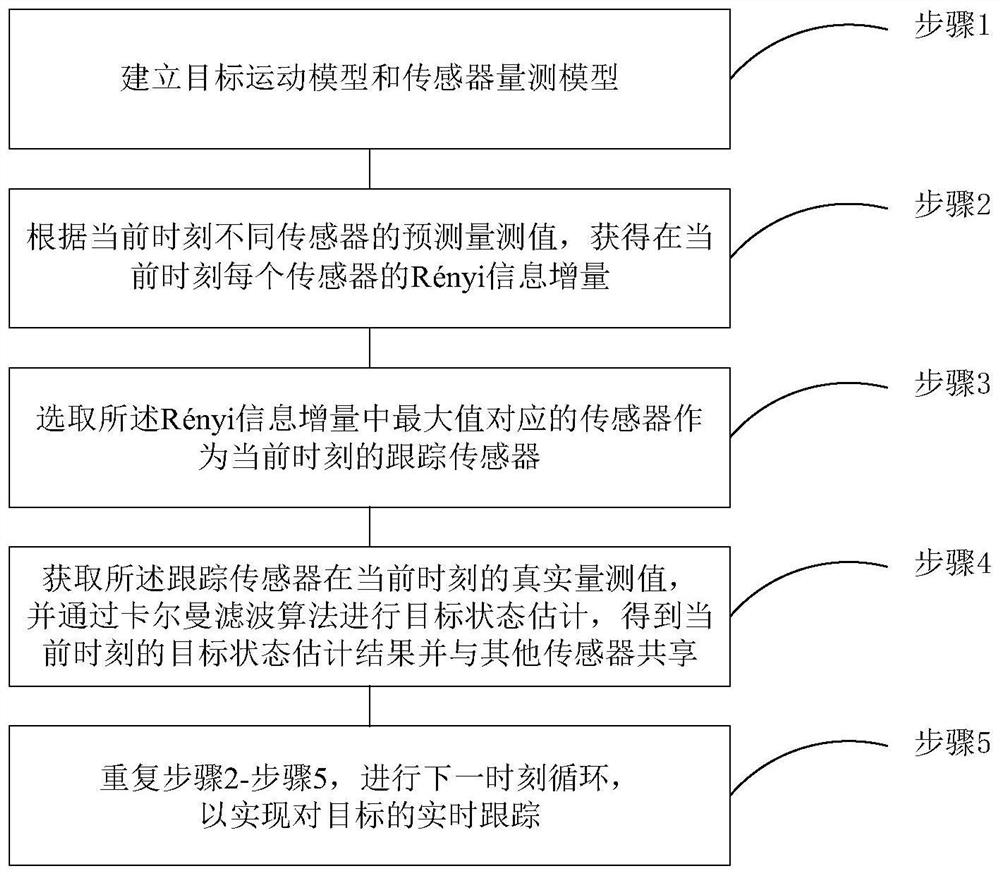
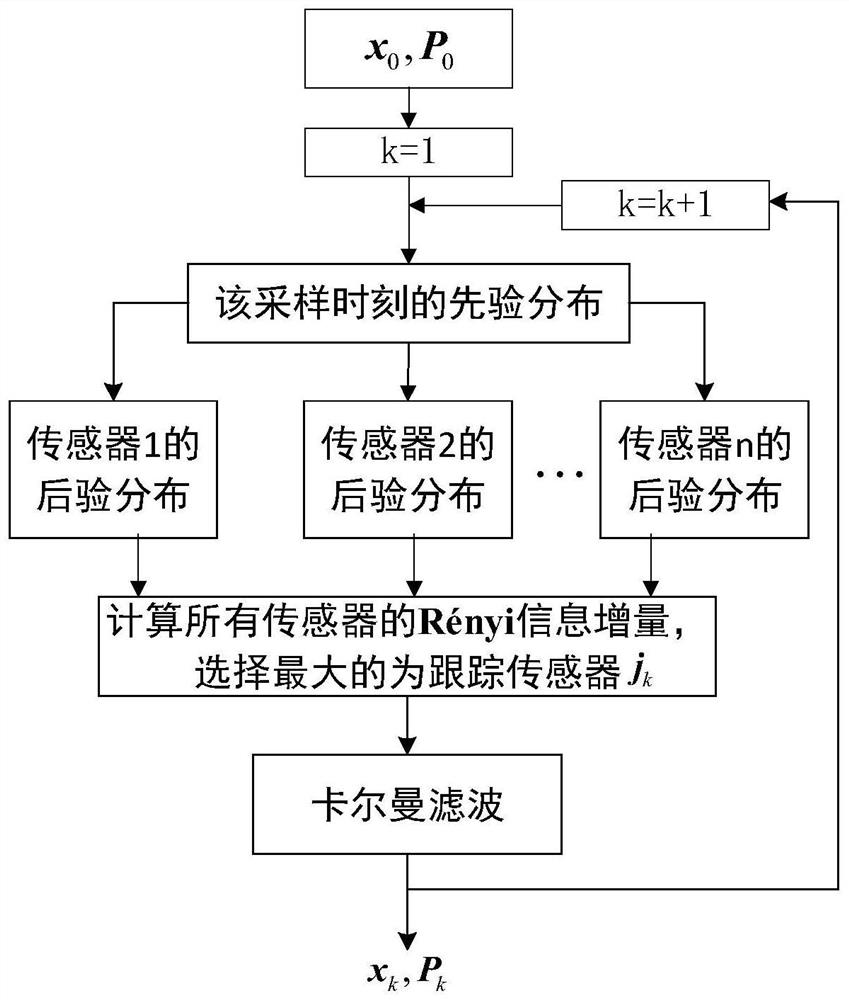
[0045] Please refer to figure 1 and figure 2 , figure 1 It is a flowchart of a multi-sensor collaborative tracking method based on Rényi information increment provided by an embodiment of the present invention; figure 2 It is a schematic flowchart of a multi-sensor collaborative tracking method based on Rényi information increment provided by an embodiment of the present invention. As shown in the figure, the multi-sensor collaborative tracking method based on Rényi information increment in this embodiment includes:
[0046] Step 1: Establish target motion model and sensor measurement model;
[0047] In this embodiment, the target motion model and the sensor measurement model are as follows:
[0048]
[0049] in, represents the target state vector at time k, (x k ,y k ) represents the position of the target in the space coordinate system at time k, Represents the speed of the target in the corresponding direction at time k, T represents the transposition, F k-1...
Embodiment 2
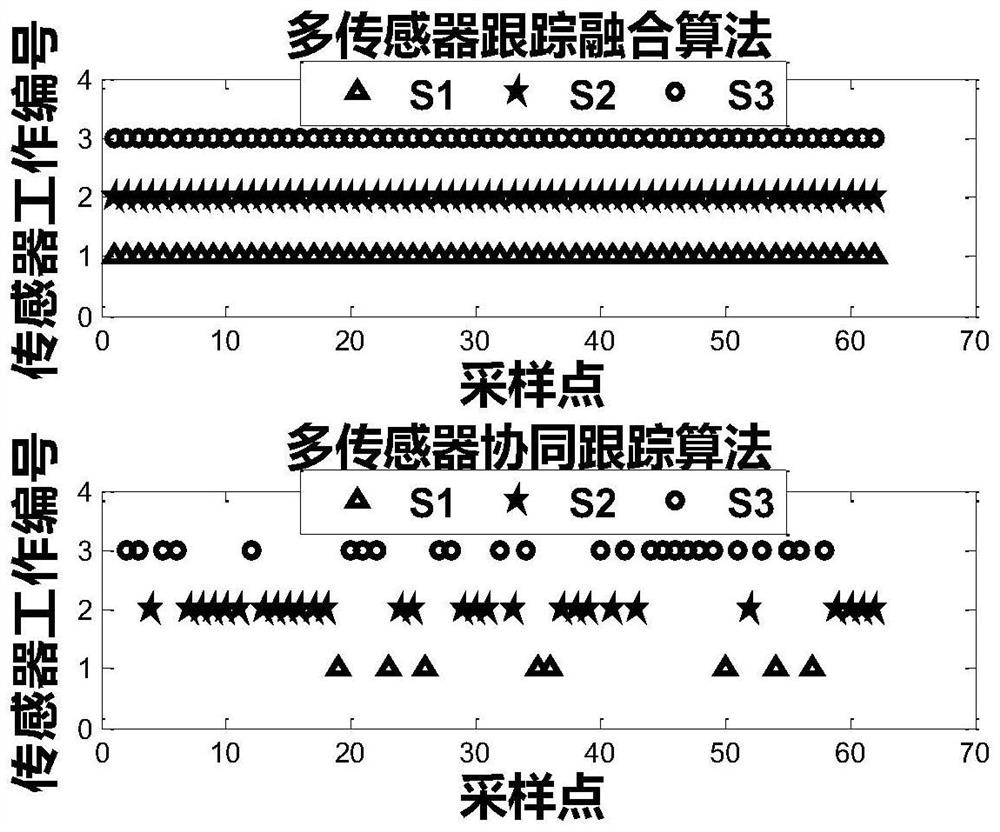
[0087] In this embodiment, the performance of the multi-sensor cooperative tracking method based on the Rényi information increment of the first embodiment is described by means of a simulation and comparison experiment.
[0088] In this embodiment, the multi-sensor collaborative tracking method based on Rényi information increment is compared with the multi-sensor tracking fusion algorithm and single-sensor tracking filtering algorithm that directly perform multi-source information comprehensive processing without sensor management.
[0089] See image 3 , image 3 are schematic diagrams of sensor working states of different tracking algorithms provided by the embodiments of the present invention, from image 3 It can be seen that each sampling point of the multi-sensor tracking and fusion algorithm requires all the sensors to be turned on, while the method of the present invention only requires one sensor to be turned on at each sampling point. Therefore, the method of the...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More