

Overall rigidity modeling method for six-axis industrial robot hole making system comprising operation tool
A technology for robot hole making and working tools, which is applied in the field of overall stiffness modeling of a six-axis industrial robot hole making system, can solve the problem that the overall stiffness model of the robot hole making system cannot be established, etc., so as to improve the integrity and accuracy and improve the processing. Accuracy and quality, the effect of overcoming the lack of stiffness
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0021] The present invention will be further described below with reference to the accompanying drawings and specific embodiments.
[0022] The present invention covers any alternatives, modifications, equivalent methods and arrangements made within the spirit and scope of the present invention. In order to give the public a thorough understanding of the present invention, specific details are described in detail in the following preferred embodiments of the present invention, and those skilled in the art can fully understand the present invention without the description of these details. In addition, the drawings of the present invention are not drawn exactly to actual scale for the purpose of illustration, and are described herein.
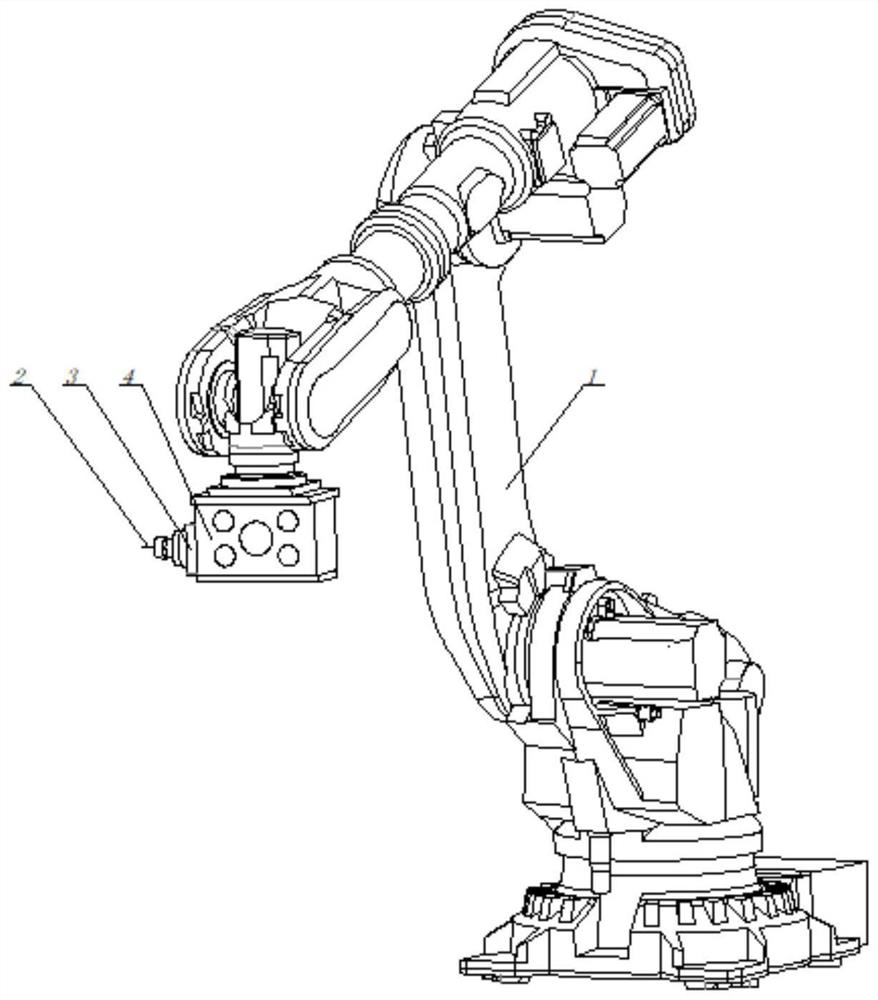
[0023] like figure 1 As shown, the six-axis industrial robot hole-making system includes a six-axis robot body 1 and a working tool, and the working tool includes a hole-making tool 2 , an electric spindle 3 and a support frame 4 .
[0024] li...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More