

Under-driven adaptive mechanical finger
A mechanical finger and underactuated technology, applied in the field of anthropomorphic robots, can solve the problems of large size, unsuitability for anthropomorphic robots, complex four-bar linkage mechanism, etc., and achieve the effect of strong self-adaptation and reduced control accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0036] Content of the present invention is described in detail as follows in conjunction with embodiment and accompanying drawing:
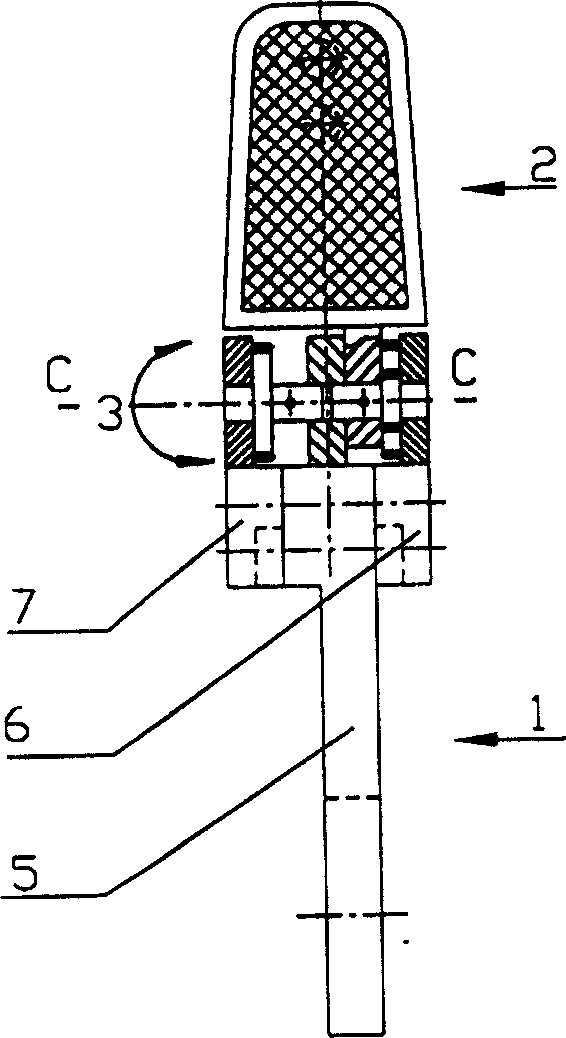
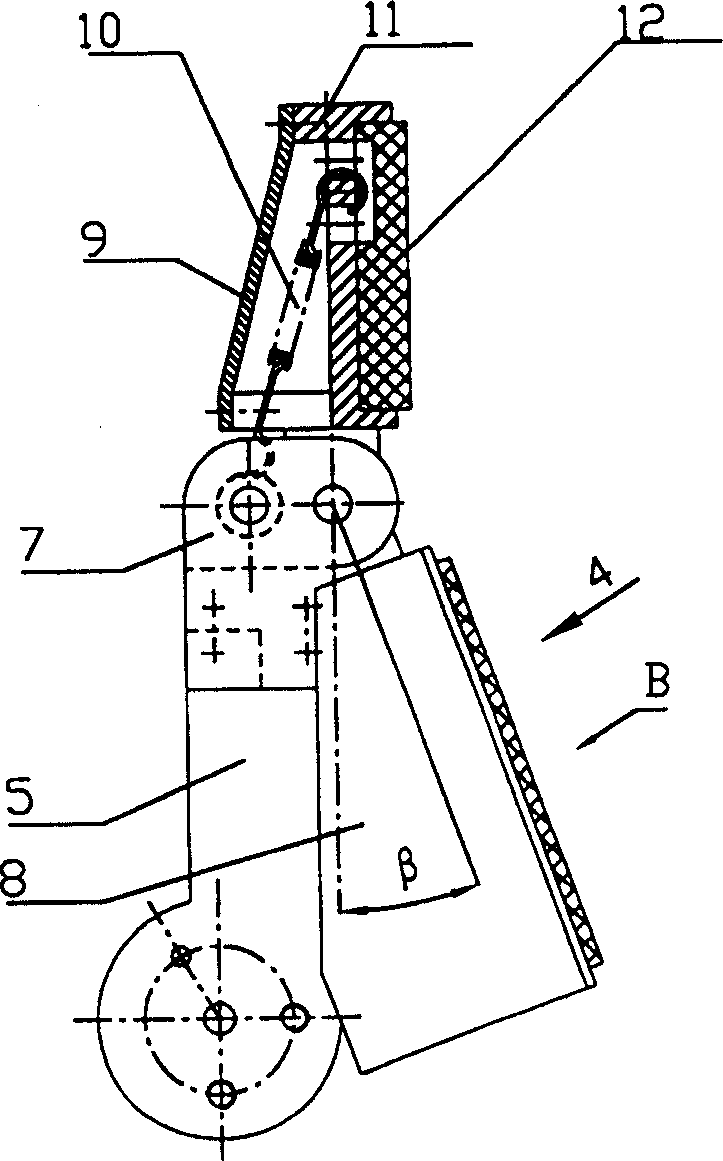
[0037] An embodiment of an adaptive underactuated mechanical finger device designed by the present invention is as follows figure 1 , 2 . An underactuated joint 3 is sleeved between the first knuckle 1 , the active plate 4 and the second knuckle 2 .
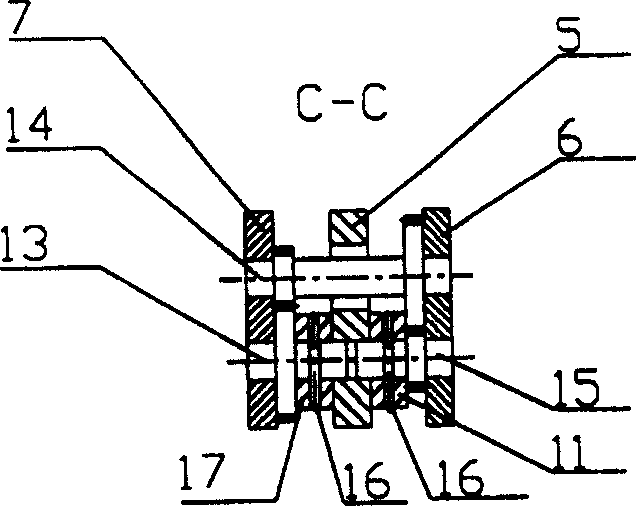
[0038] The first phalanx 1 includes a first phalanx middle plate 5 , a left bearing plate 7 and a right bearing plate 6 . The three are fixed together by screws.
[0039] The active board 4 includes an active board skeleton 17 , a left side board 8 , a right side board 18 , and an active board surface board 19 . The active plate skeleton 17 is fixed together with the left side plate 8 and the right side plate 18 by screws. Active plate surface plate 19 is bonded on the surface of active plate skeleton 17 with glue.
[0040] The second phalanx 2 includes a second phalanx frame 11 , a second pha...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More