

Foot structure of four foot walking robot with foot float support
A walking robot and floating support technology, applied in the field of robotics, can solve problems such as walking machine failure, failure to meet requirements, motor stalling, etc., and achieve the effects of increasing contact time, simplifying control schemes, and reasonable design
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
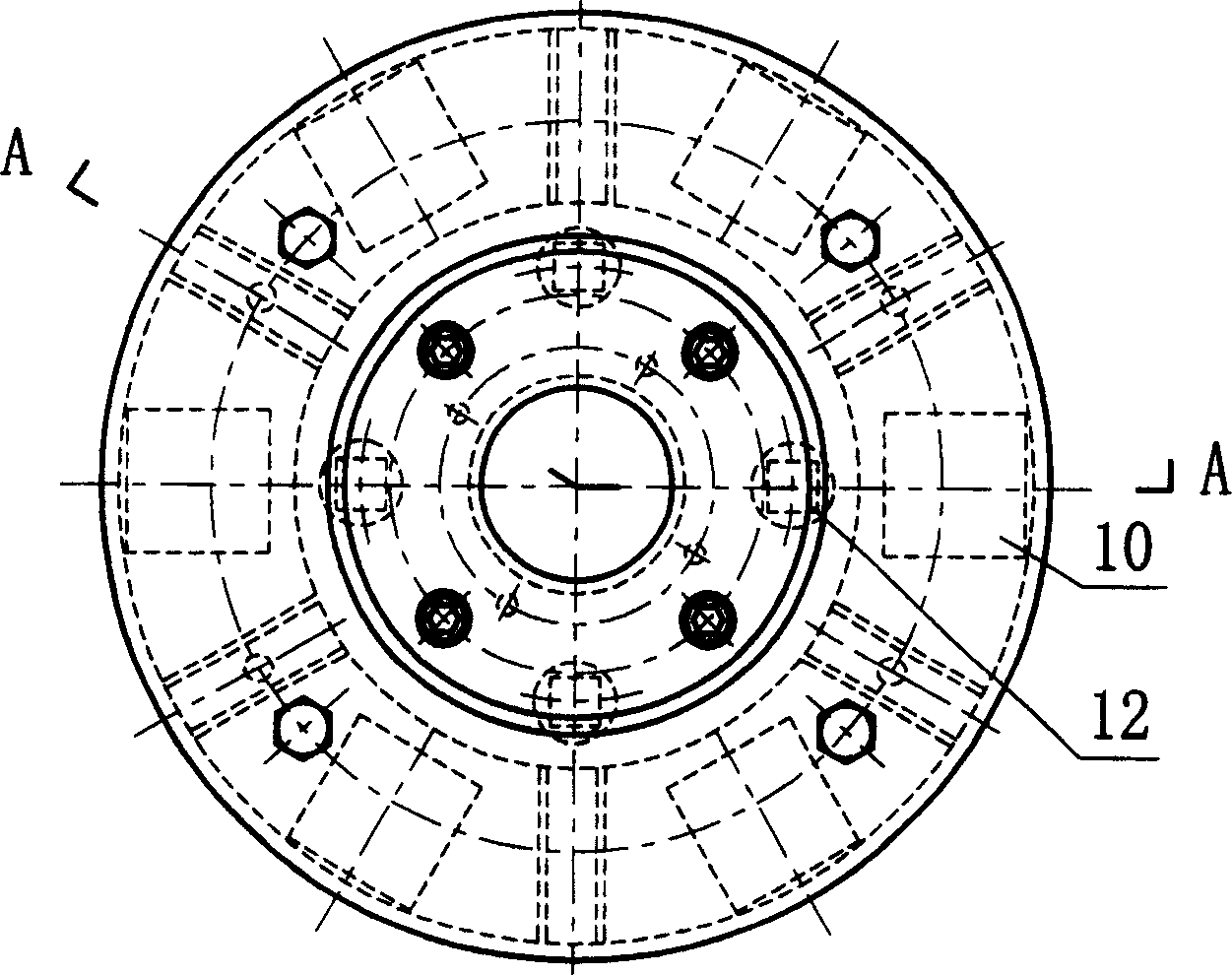
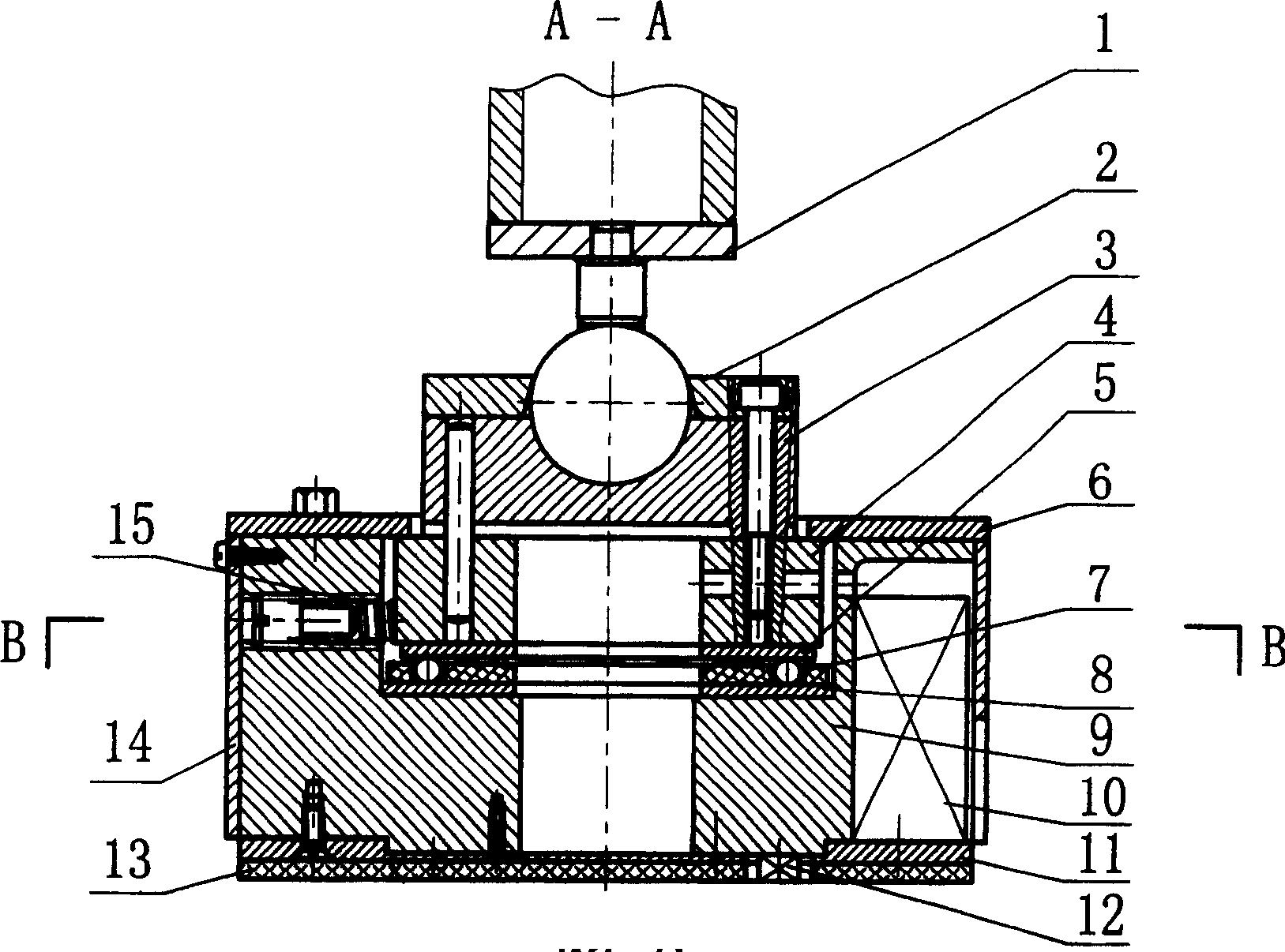
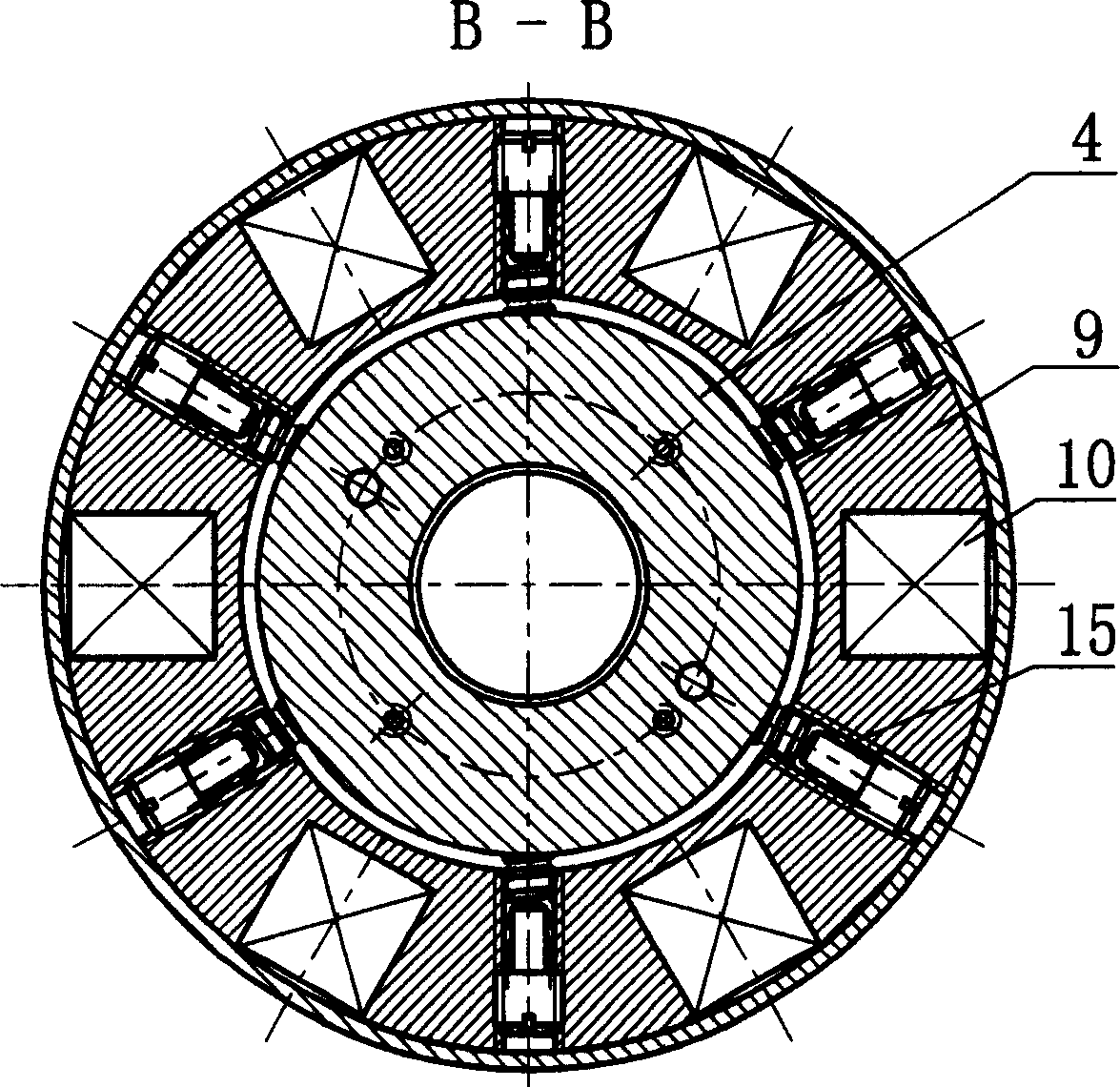
[0017] Such as Figure 1-4 As shown, the present invention includes: shank 1, spherical secondary cover plate 2, joint 3, instep seat 4, upper gasket 5, pressure plate 6, ball 7 with cage, lower gasket 8, sole seat 9, proximity sensor 10 , Foot pad 11, tactile sensor 12, buffer pad 13, jacket 14, stage clip 15.
[0018] The joint 3, the instep seat 4 and the upper gasket 5 are fixedly connected by pins and threads to form the instep of the member, the lower gasket 8 and the sole seat 9 are fixedly connected by the thread to form the sole of the member, and the instep is connected to the calf 1 through a spherical pair, and the spherical auxiliary cover The plate 2 is connected on the instep to form a part of the spherical pair. The sole of the foot is connected on the instep through a radial moving pair. The ball 7 with a cage is connected between the two contact surfaces of the moving pair. The two ends of the compression spring 15 respectively press On the outer cylindrical...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More