

Registration deviation on line compensation method of multisensor grafting tracing system
A technology of multi-sensor fusion and registration deviation, applied in radio wave measurement systems, instruments, road network navigators, etc., can solve the problems of difficult to achieve real-time processing, large amount of calculation, low effectiveness, etc., to simplify data association and Tracking algorithms, improving processing speed, and speeding up the effect of the convergence process
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0020] In order to better understand the technical solutions of the present invention, the implementation manners of the present invention will be further described below in conjunction with the accompanying drawings.
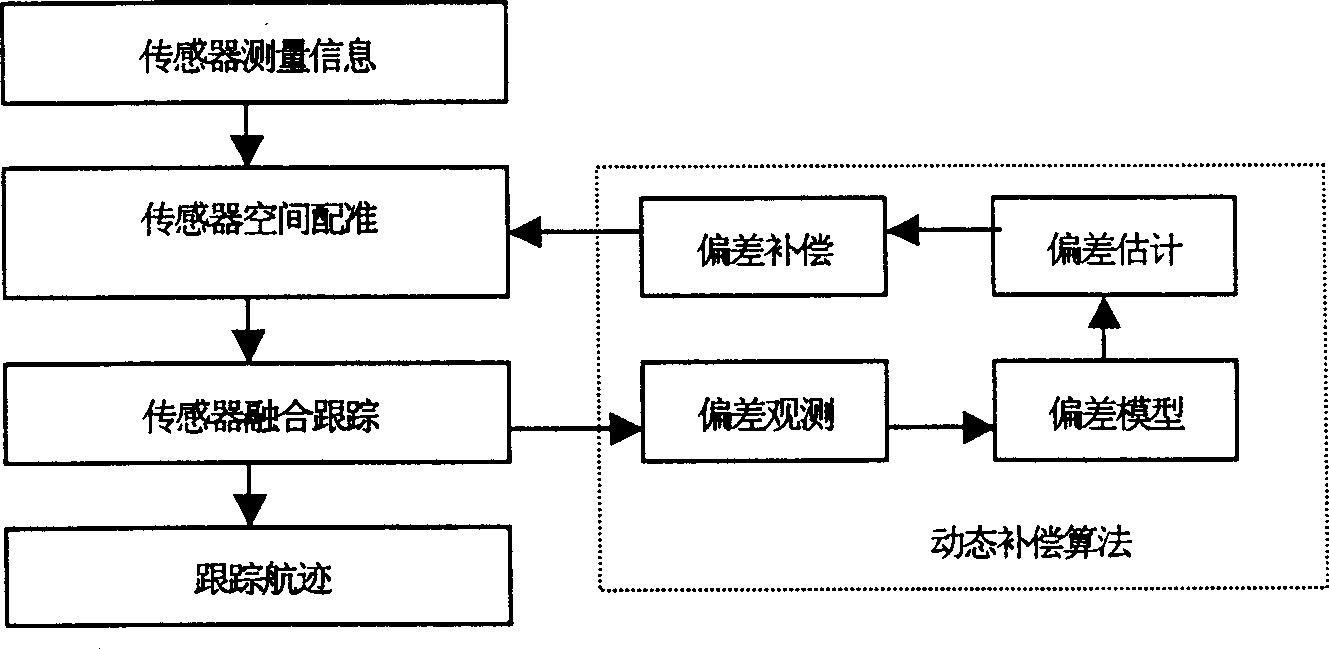
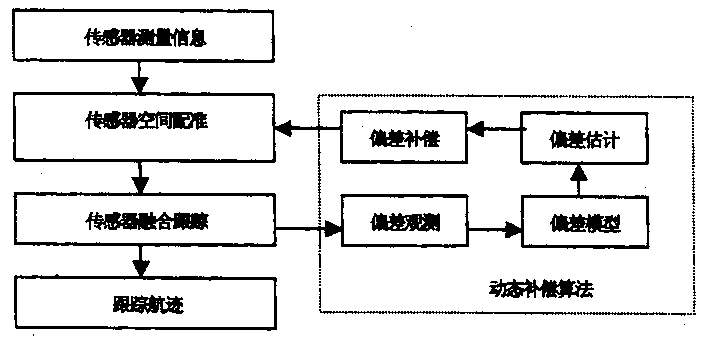
[0021] figure 1 It is an overall block diagram of an online compensation method for registration deviation of a multi-sensor fusion tracking system proposed by the present invention. The specific implementation details of each part are as follows:
[0022] 1. Sensor measurement information
[0023] Each sensor in the sensor measurement information module measures the target, obtains the measurement information of the target, and sends the measurement information to the sensor space registration module.
[0024] 2. Sensor spatial registration
[0025] The output of the sensor measurement information module is sent to the spatial registration module, and the spatial registration module dynamically compensates the compensation input information of the deviation...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More