

Variable structured crawler type wall climbing robot
A wall-climbing robot and crawler-type technology, applied in manipulators, manufacturing tools, etc., can solve problems such as limited structural changes and insufficient wall adaptability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0020] The present invention will be described in further detail below in conjunction with the accompanying drawings and embodiments.
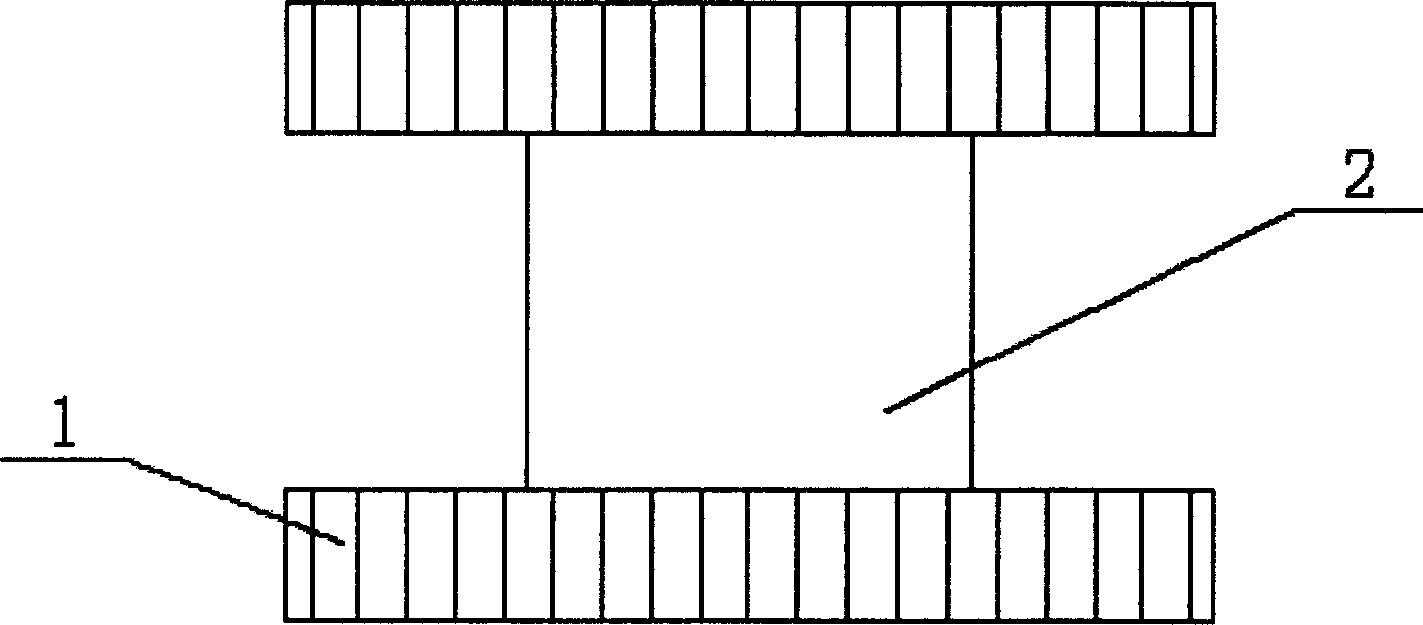
[0021] figure 1 The body of the variable-structure crawler-type wall-climbing robot shown includes two symmetrically arranged crawlers 1, a vehicle-mounted operating system 2 located between the crawlers 1, and the support mechanism described below. Several suction cups are evenly installed on the outer surface of the crawler belts 1. , the robot can rely on these suction cups to stick to the wall. According to the different materials and surface conditions of the working wall, the corresponding adsorption methods can be selected, such as vacuum adsorption, magnetic adsorption, etc.
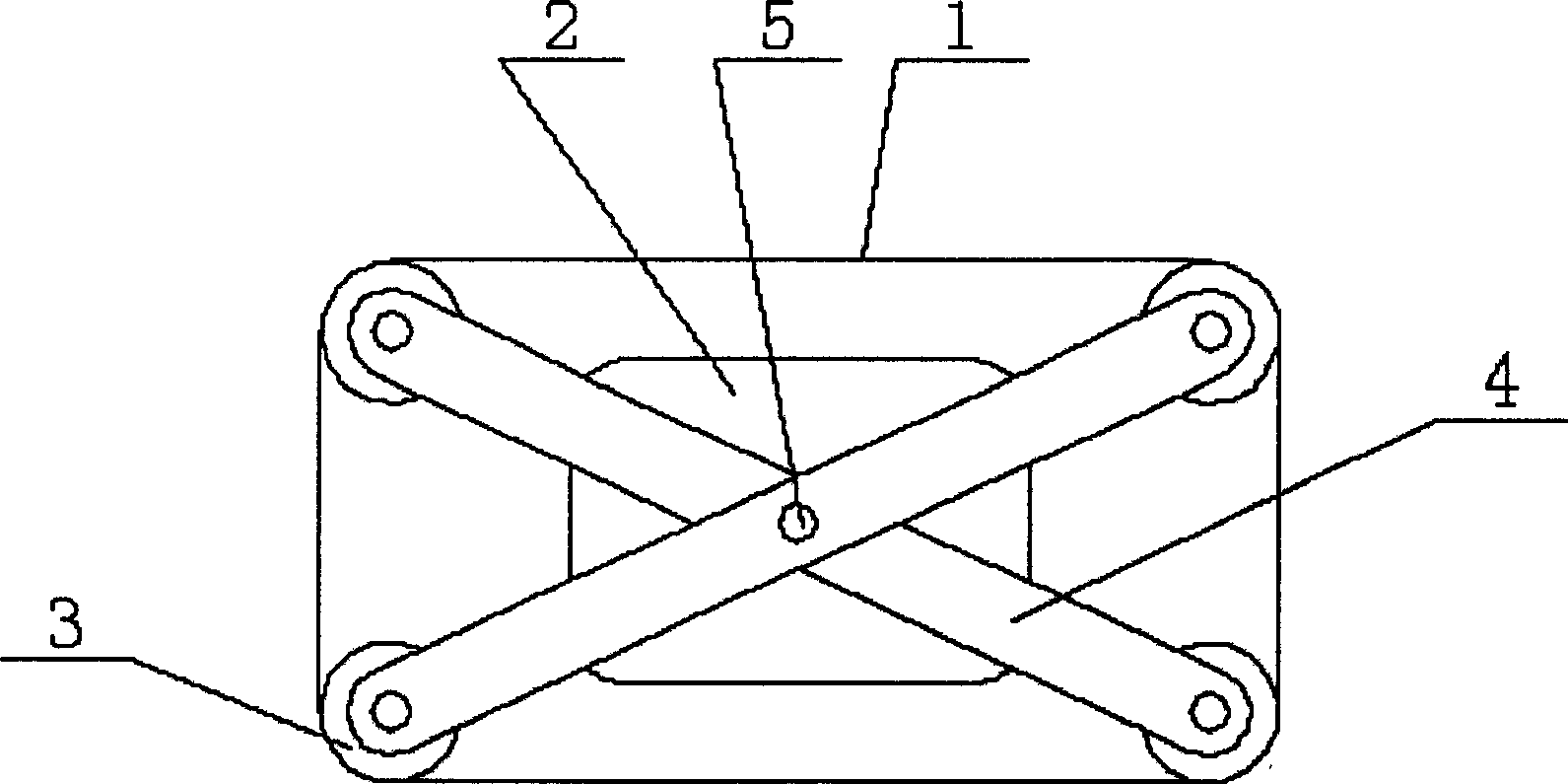
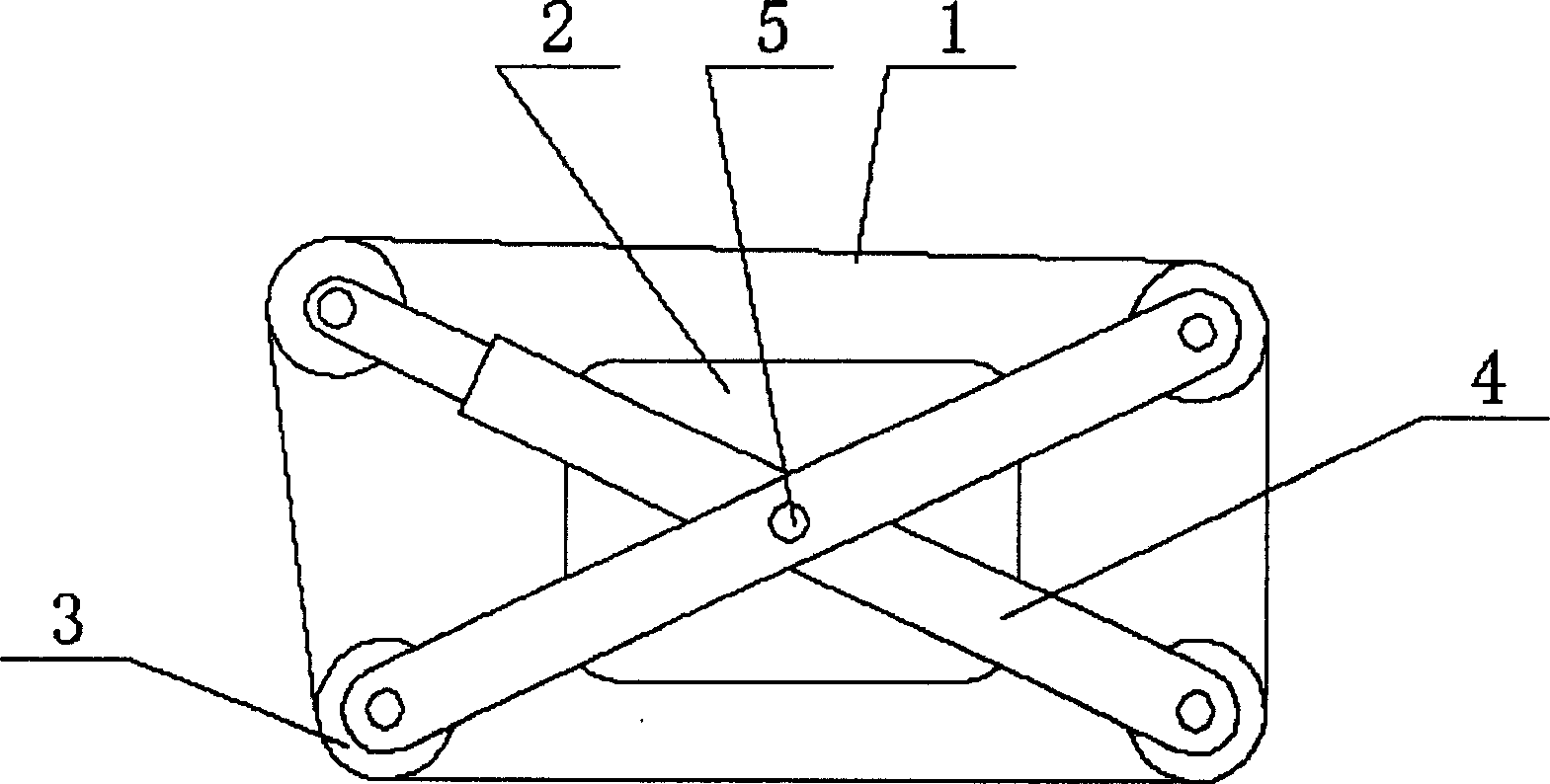
[0022] Figure 2a Shown is the first embodiment of the variable structure crawler wall-climbing robot of the present invention, wherein each track 1 is engaged with four pulleys 3, and the pulleys 3 are supported by two support rods 4, and each support rod 4 T...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More