

Flexible propelling mechanism of artificial machine fish
A technology of propulsion mechanism and robotic fish, applied in the field of robotics, can solve the problems that the head swing cannot be solved well, the mechanism and control are complicated, and no robotic fish has been found, so as to achieve a wide range of practical application value, easy to control, and improve propulsion efficiency Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0036] The technical solutions of the present invention will be further described below in conjunction with the accompanying drawings and embodiments.
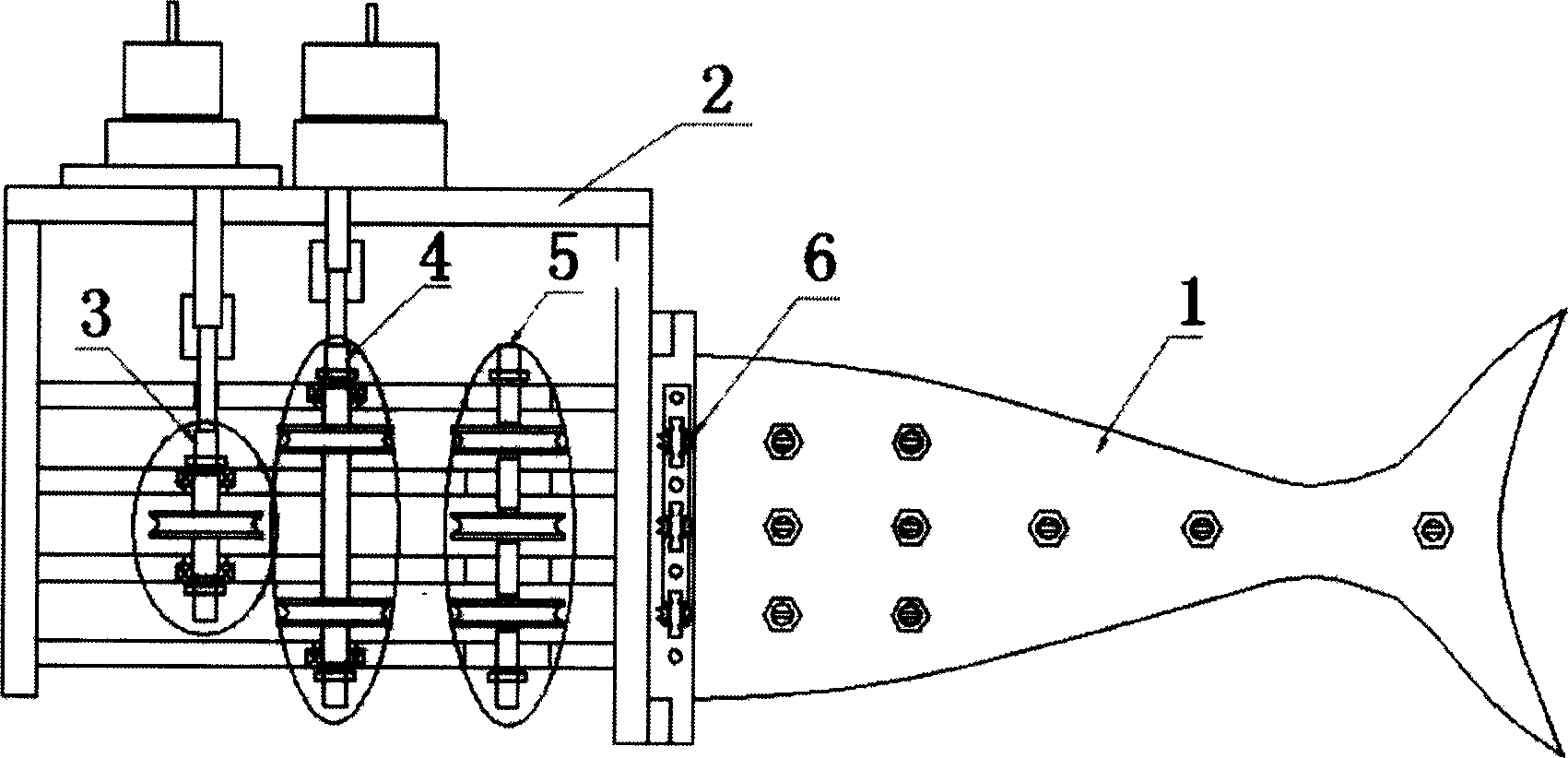
[0037] The propulsion mechanism of the present invention mainly includes a flexible tail that can imitate the twitching of fish muscles to drive the fish tail to swing in a coordinated manner, and a mechanism part and an electric control part driven by a motor in the fish body. The overall structure is as follows: figure 1 shown. The fish tail 1 made of stainless steel elastic steel sheet is fixed by threaded fasteners and the fish body support 2, the caudal fin driving part 3 and the tail driving part 4 are connected with the fish body support 2 through bearings, and the adjustable limit part 5 is connected by fastening nuts Linked to each other with the fish body support 2, the fixed spacer component 6 is connected with the fish body support 2 through its own fixed spacer wheel support.
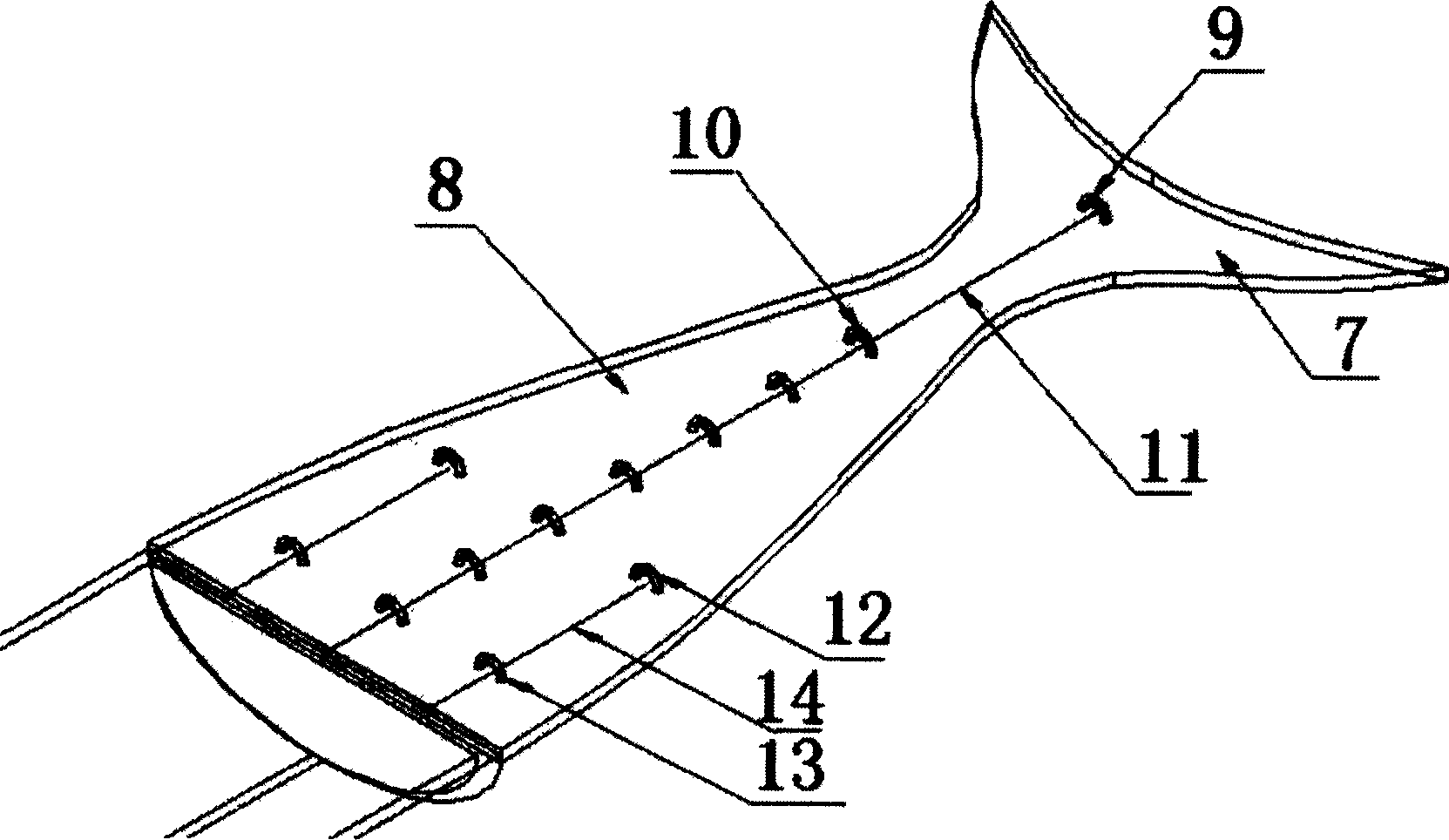
[0038] The embodiment of the fishta...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More