Fingerstall type force feeling feedback generator
A finger-sleeve, force feedback technology, used in manipulators, manufacturing tools, etc., can solve the problems of incomplete grasping of the palm, complex control circuit, fatigue of hand capacity, etc., and achieve the effect of light weight, complex mechanical structure and simple control.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
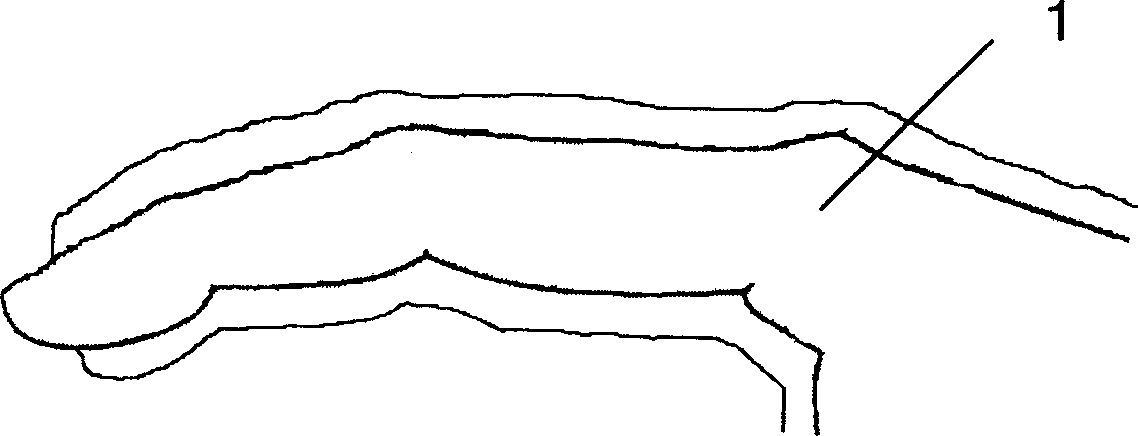
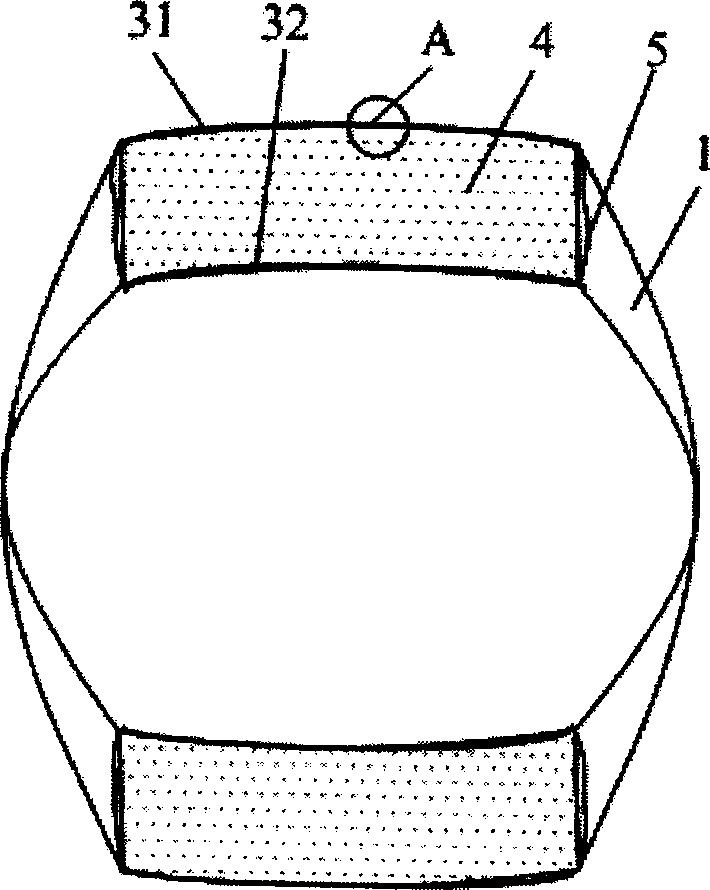
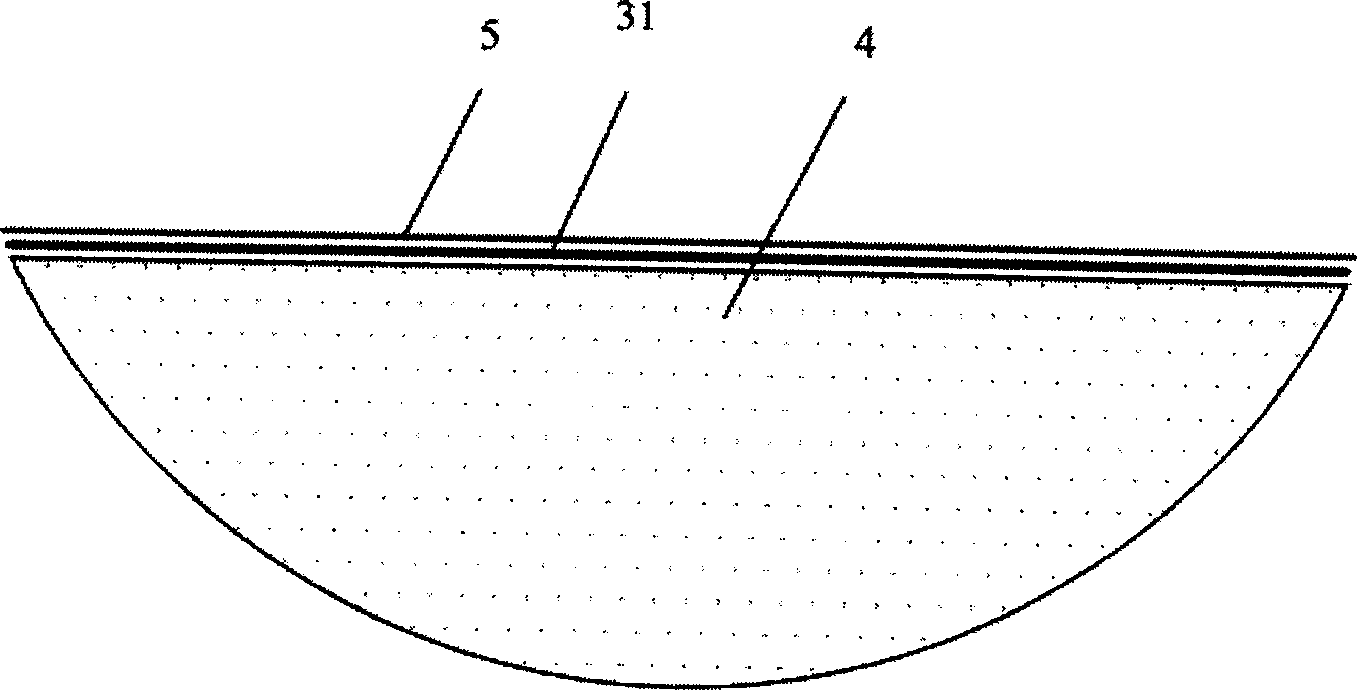
[0016] A finger cuff type force feedback generator for force feedback data glove used to realize man-machine docking controlled by a teleoperated robot, comprising a fixed belt 1 connected with an electrically controllable hardness element, the electrically controllable hardness The element is made up of rubber sheath 5 and electrodes 31, 32, and electrodes 31, 32 are respectively arranged on both sides of rubber sheath 5, and electrorheological fluid is arranged in rubber sheath 5, and above-mentioned fixed band 1 can adopt the fingertip form ( Such as figure 1 As shown), it can also form a ring through the electric controllable hardness element connected with it, so as to be used on the data glove. A porous soft block 4 is arranged in the rubber sheath 5, and the electrorheological fluid is arranged in the porous soft block. In the hole of the body 4, the porous soft block 4 is a sponge block, the porous soft block 4 can also adopt other porous soft materials, and the electr...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More