

Apparatus and method for controlling elastic actuator
A technology of a control device and a control method, which is applied to fluid pressure actuation devices, electric controllers, adaptive control, etc., can solve problems such as poor responsiveness, inability to perform real-time operations with robotic arms, and achieve stable performance. The effect of less state deviation and good responsiveness
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment approach 1
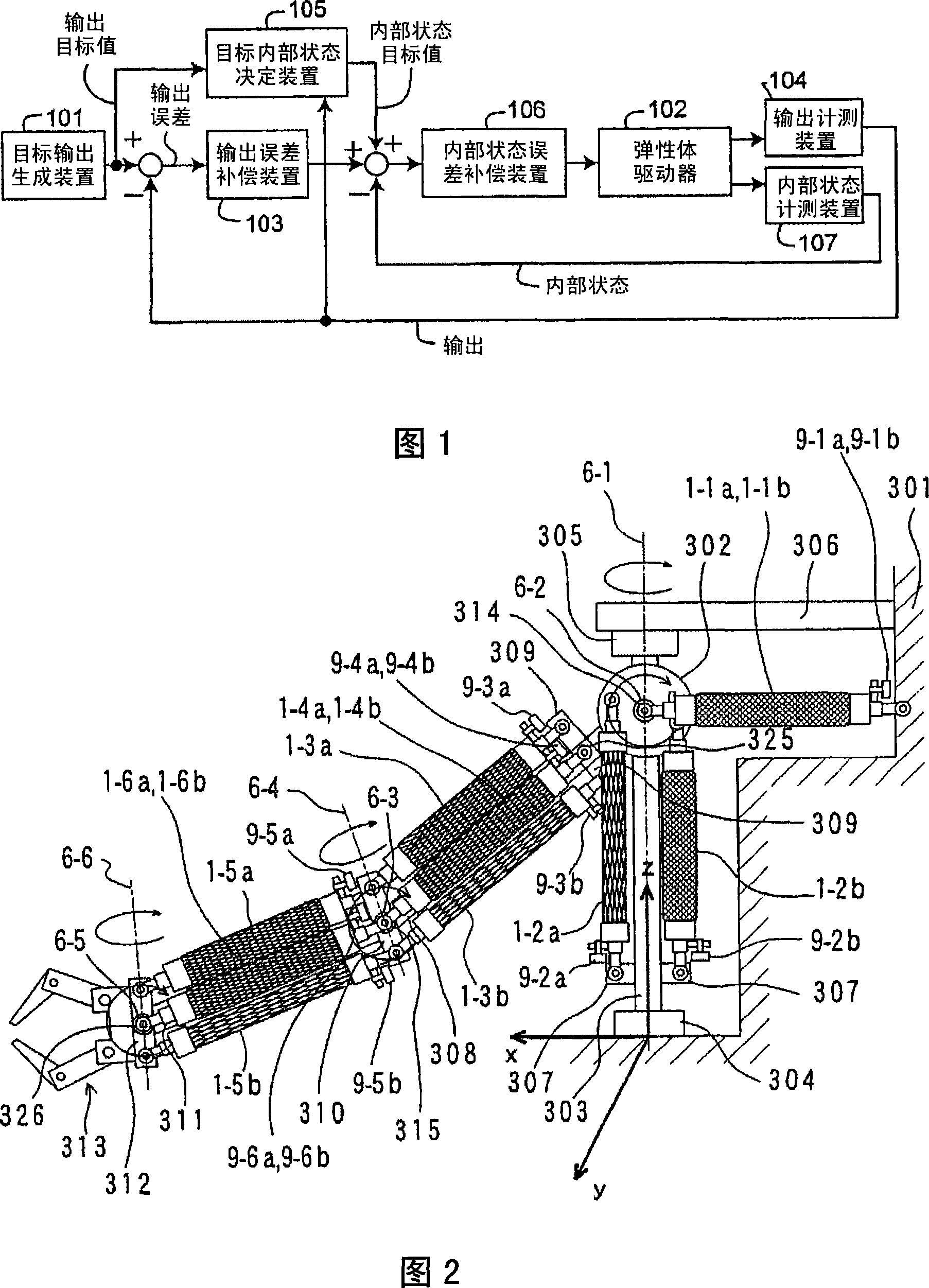
[0236] FIG. 1 is a block diagram showing the concept of an elastic body actuator control device according to Embodiment 1 of the present invention. In FIG. 1, 101 is a target output generating device that generates a target value of the output of the elastomer actuator 102 as a fluid pressure actuator driven by fluid pressure. 104 is an output measurement device connected to the elastic body driver 102, measures the measured value of the output of the elastic body driver 102, and inputs the measured value into the target internal state determination device 105 and the output error compensation device 103. 103 is the input The output error compensation device of the target value from the target output generating device 101 is controlled so that the measured value of the output of the elastic body driver 102 measured by the output measuring device 104 follows the target value. 105 is a target internal state determination device inputted by the output information of the target output...
Embodiment approach 2
[0290] Picture 10 It is a figure which shows the structure of the control apparatus of the elastic body actuator of Embodiment 2 of this invention. Picture 10 Among them, 201 is a gravity compensation device. A control system is formed in which the target joint angle vector q of the robot arm 10 is output from the target trajectory generating device 11 d , The feedback control of the joint angle that compensates for the difference between the current joint angle vector q measured by the encoder 8 is performed. Other composition and Figure 6 The illustrated control device of the first embodiment is the same, and the description will be omitted.
[0291] The current joint angle vector q measured by the encoder 9 is input into the gravity compensation device 201, the posture of each link of the robot arm 10 is calculated by the gravity compensation device 201, and each link due to gravity is calculated by the gravity compensation device 201. The torque value generated in the join...
Embodiment approach 3
[0294] Picture 11 It is a figure which shows the structure of the control apparatus of the elastic body actuator concerning Embodiment 3 of this invention. Picture 11 Among them, 202 is a temperature compensation device. The robot arm 10 is provided with a temperature sensor (not shown) as an example of the internal state measuring device 107 to measure the temperature T of the elastic body of the elastic body actuator 102. Other composition and Picture 10 The illustrated control device of the second embodiment is the same, and the description will be omitted.
[0295] When the temperature of the elastomer of the elastomer actuator 102 changes, the elastic modulus of the elastomer changes, and the target pressure difference ΔP is calculated d The coefficients A and b of formula (1) change. In order to compensate for the influence caused by the temperature change of the elastic body, the temperature T is input into the temperature compensation device 202. The temperature compen...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More