

Three-dimensional in-situs vision measuring-value delivering method and device
An on-site measurement and three-dimensional vision technology, applied in the direction of measuring devices, optical devices, instruments, etc., can solve the problems of low calibration accuracy, limited applicable space, cumbersome calibration process, etc., and achieve simple operation process and suitable for on-site application , The effect of high calibration accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
[0064] 1. Examples of binocular system calibration
[0065] For the binocular system, the main calibration is the internal and external parameters of the camera. Figure 5 It is a plane target image designed for binocular system calibration. The target surface has 35×19 X-shaped calibration points, and the distance between each two adjacent points in the vertical and horizontal directions is 1.5mm. The specific calibration steps are as follows:
[0066] (1) Place the target plane arbitrarily in the calibration space, turn on the power of each camera to shoot, and store the image in the computer;
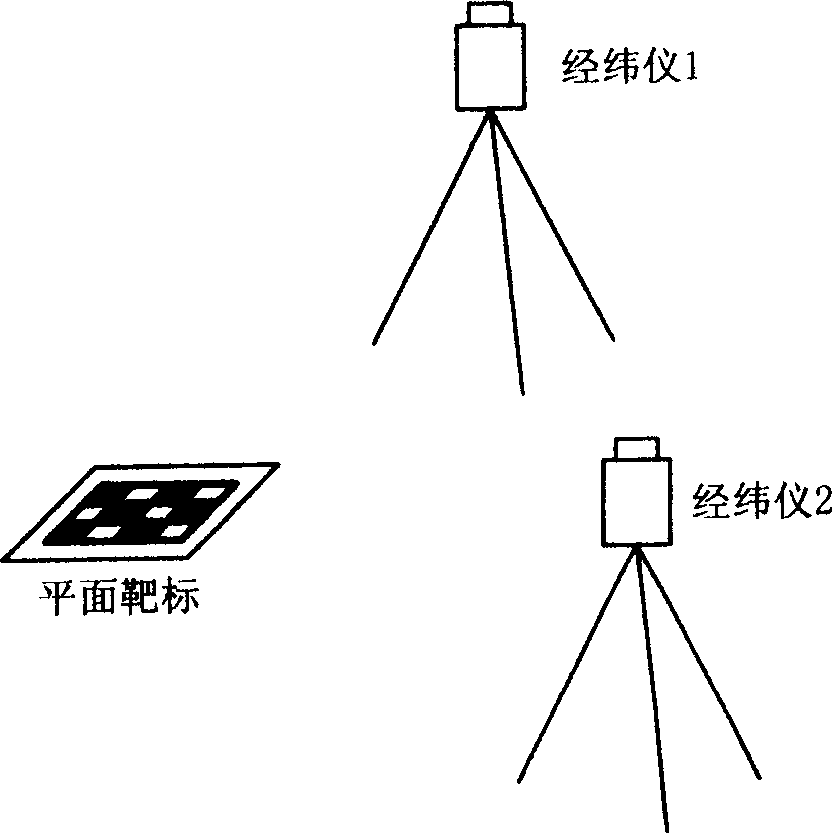
[0067] (2) Use the dual theodolite system to measure the spatial coordinates of any three non-collinear calibration points on the target surface, and combine their coordinates in the target coordinate system to obtain the spatial conversion relationship from the target coordinate system to the theodolite coordinate system;
[0068] (3) For each camera, extract the image coordinates of th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More