

Crawler type multiple joint hinged robot suitable for search and detection in coal mine
An articulated robot and crawler-type technology, applied in the field of search and detection robots, can solve problems such as easy overturning of robots and poor ability to overcome obstacles, and achieve strong mobility and reliability, which is conducive to popularization and application
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
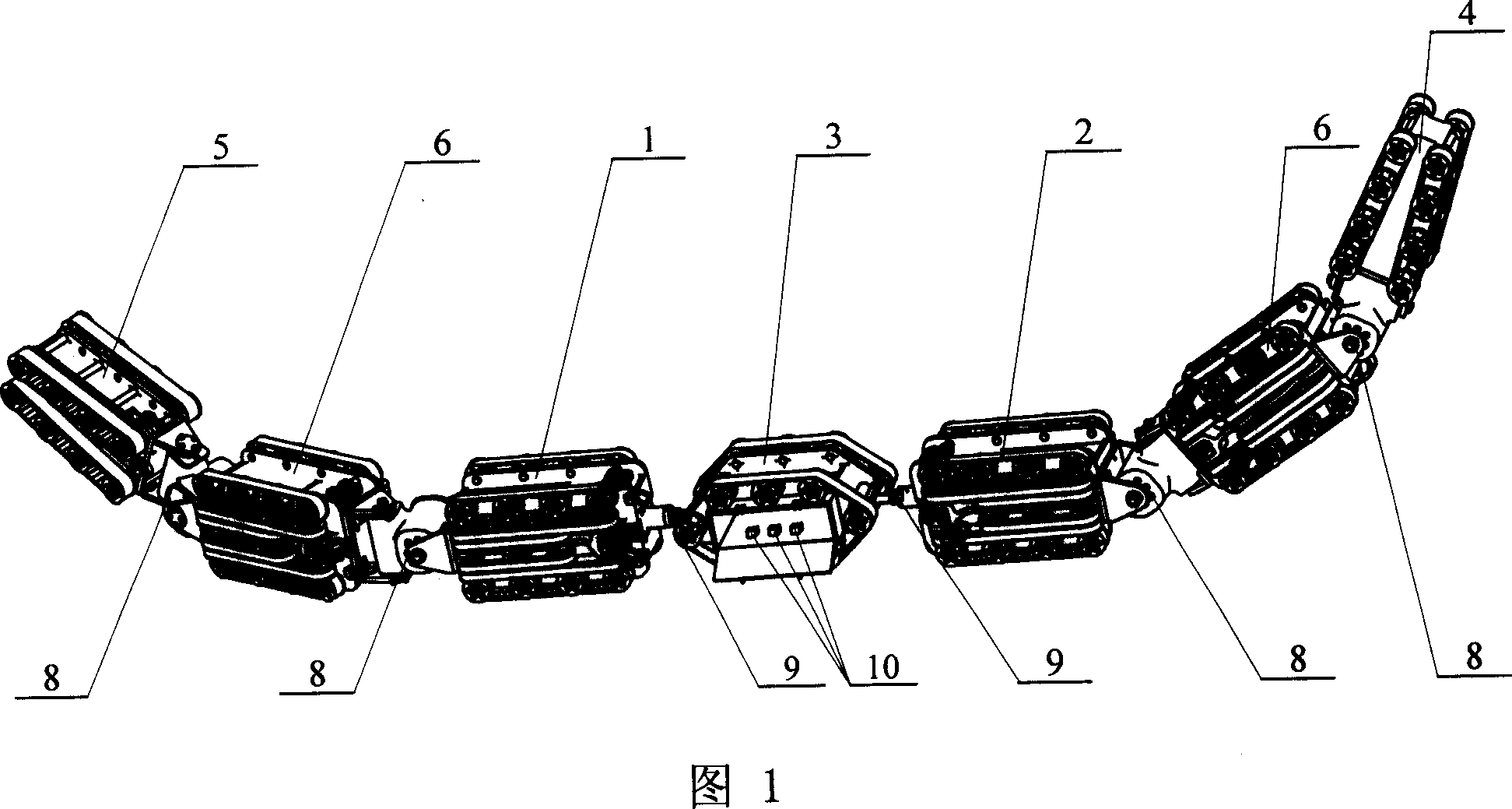
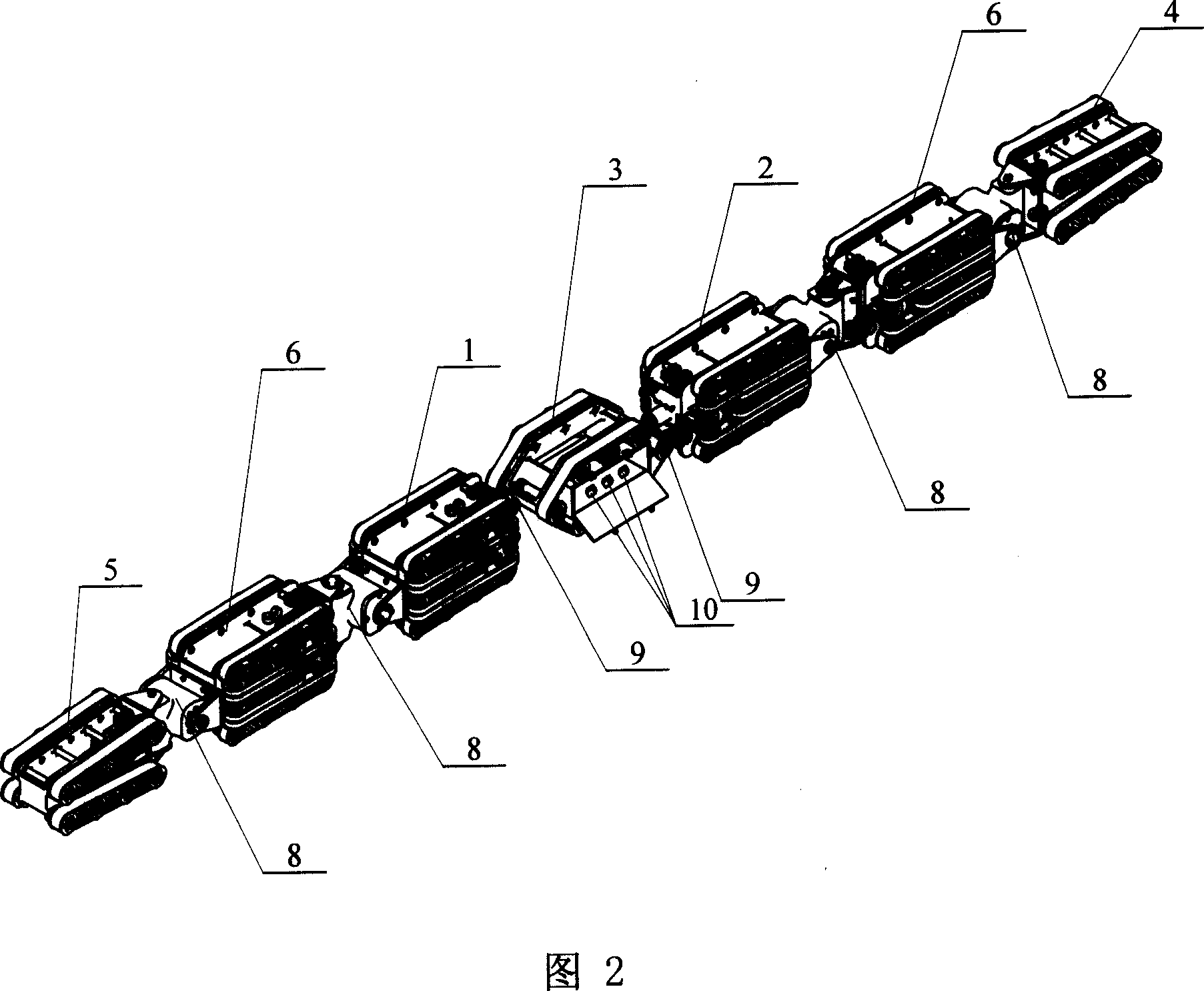
[0007] Specific implementation mode 1: This implementation mode is a crawler-type multi-joint articulated robot suitable for coal mine search and detection. The technical solution adopted is to divide all components of the robot into several modules, and connect each module through hinges to form a slender The structure enables the robot body to adjust its posture according to the irregular terrain, so as to climb over a large steep slope or deep ditch, or enter a narrow area to perform search and rescue tasks. Referring to Fig. 1 and Fig. 2, its specific structure includes a power supply, a control sensor and a mounting body, and the power supply, the control sensor and the mounting body are respectively made into respective unit modules to form a power supply unit module 1 and a control sensing unit module 2 And carrying unit module 3, it also comprises head unit module 4, tail unit module 5 and hinge driving unit module 6, is connected to become serpentine by hinge between d...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More