

Human vola-emulated mechanism with force-sensing ability
A technology of perceptual ability and sole, applied in toys, motor vehicles, automatic toys, etc., can solve the problem of neglecting the movement function of the toe joint, and achieve the effect of light weight, compact structure and simple structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
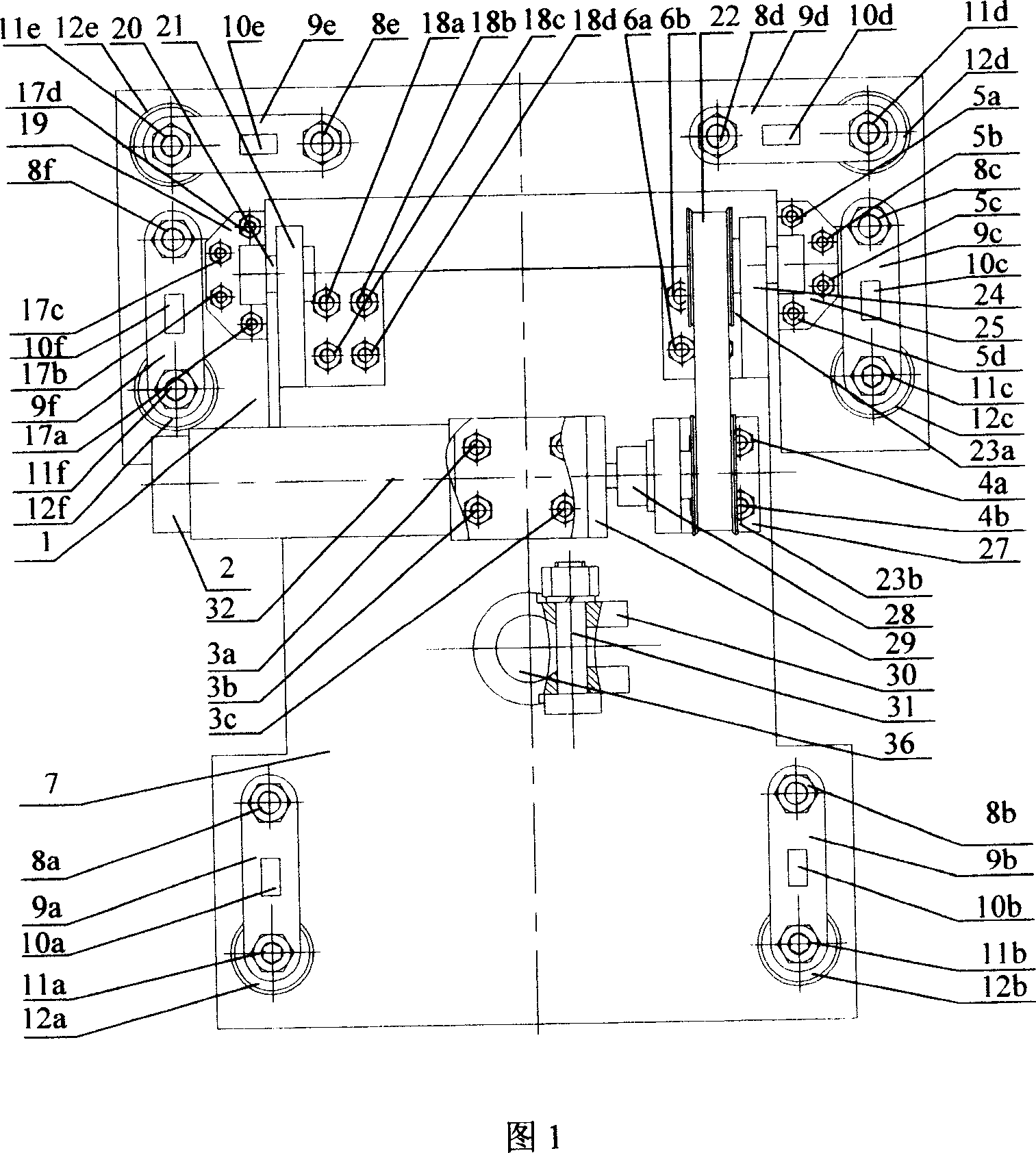
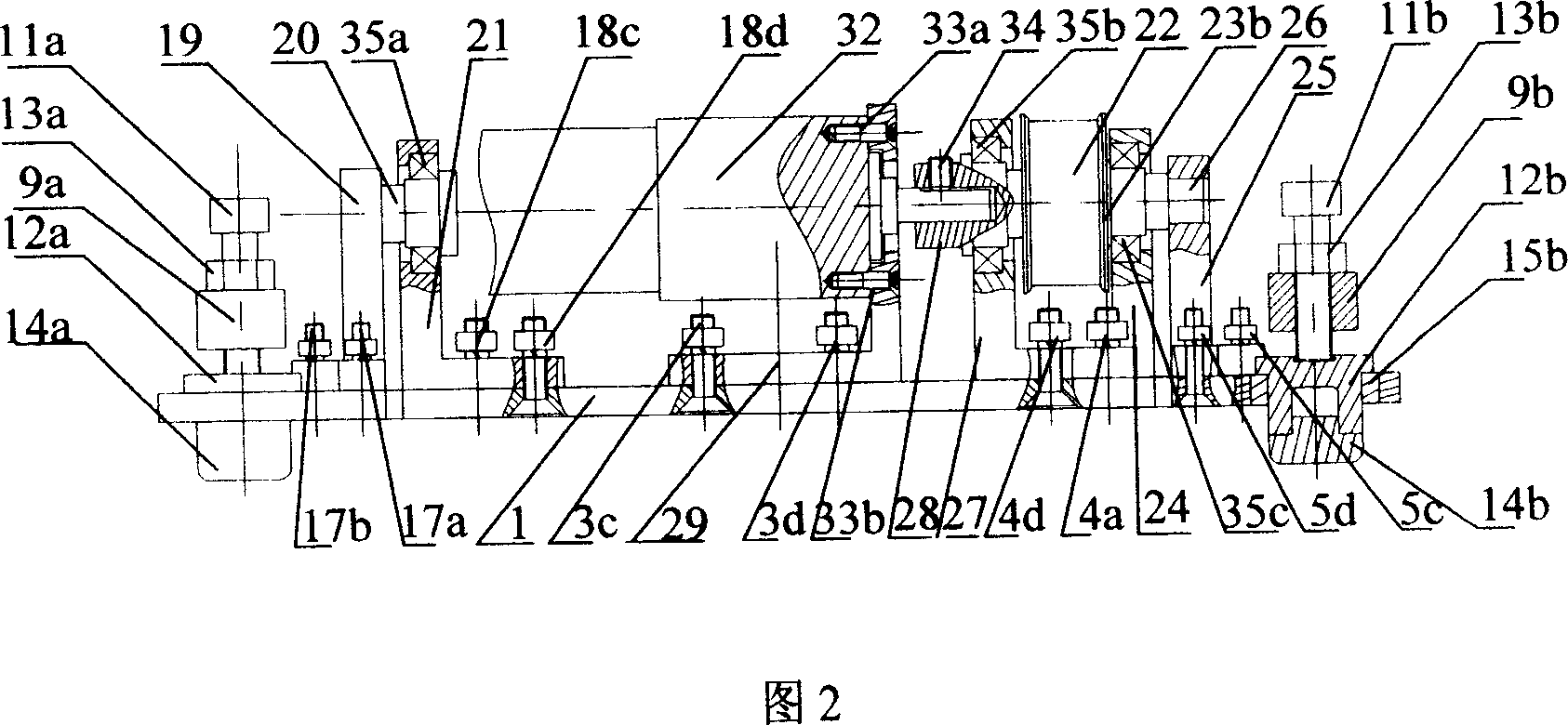
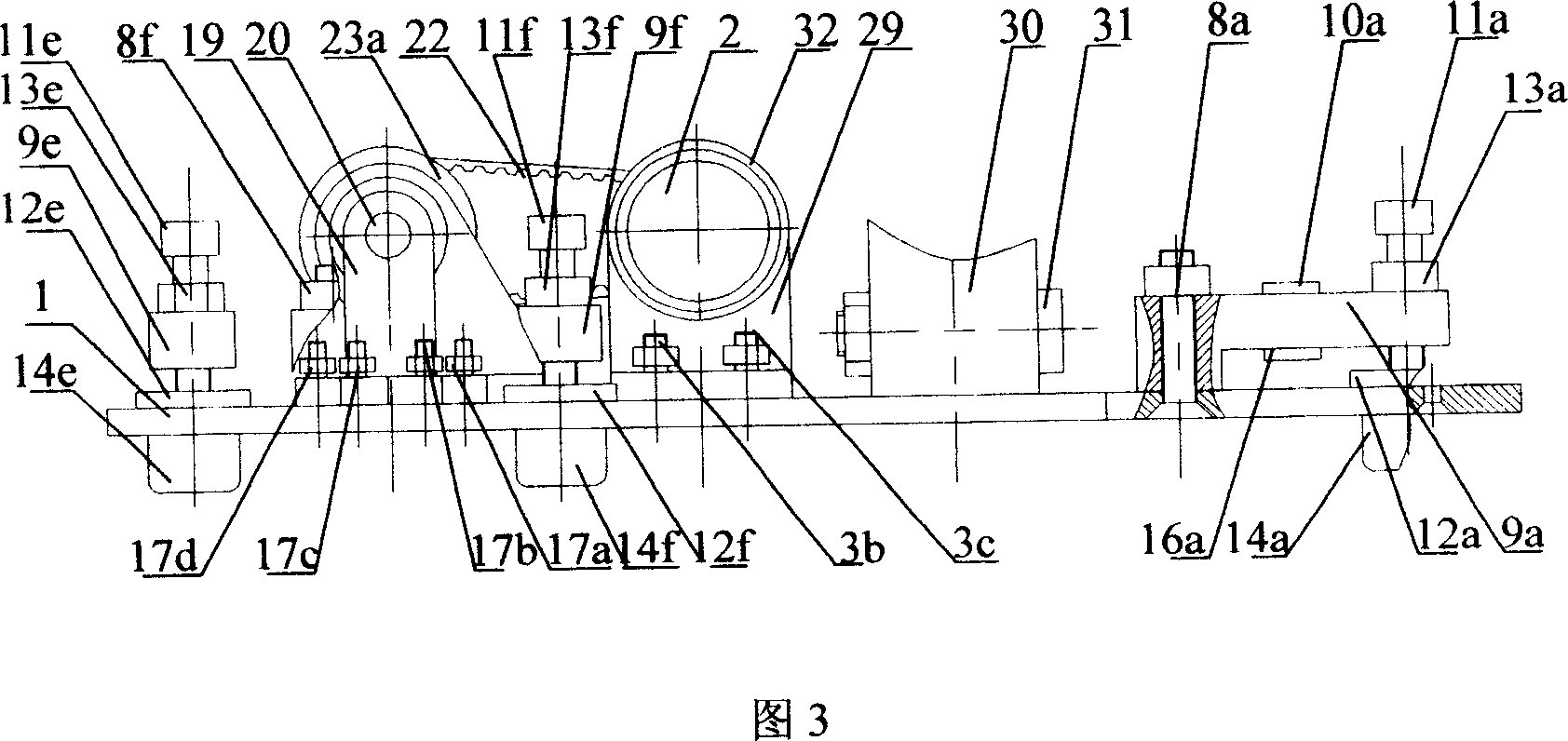
[0030] With reference to Figures 1-3, this embodiment includes a forefoot 1, a rear foot 7, six force-sensing detection components, a rotating shaft connecting the forefoot and the rear foot and related transmission components, and the forefoot 1 has four force-sensing detection components c, d, e, f, four force-sensing detection components are symmetrically distributed on the outermost edge of the support surface; the rear foot 7 has two force-sensing detection components a, b and a connecting end seat 36 connected to the ankle joint , wherein, two force-sensing detection components a, b are symmetrically distributed on the rear side edge of the rear foot 7, and the connecting end seat 36 and the ankle joint tightening ring 30 are tightly connected by bolts 31; the six force The structures of the sensing and detecting components are the same. In order to avoid unnecessary repetition, a force sensing and detecting component a is described. The force sensing and detecting compon...
Embodiment 2
[0036] With reference to Figures 4, 5 and 6, this embodiment makes some changes on the basis of Embodiment 1, specifically, the timing belt 22 connecting the gears 23a and 23b in Embodiment 1 is removed, and the gear 23a and 23b are changed into gears 37a and 37b, and the synchronous belt transmission of the original embodiment 1 is changed into the gear transmission of said gears 37a and 37b meshing, and others are the same as embodiment 1.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More