

Method and apparatus for preview-based vehicle lateral control
a vehicle lateral control and vehicle technology, applied in the field of vehicle lateral stability control systems, can solve problems such as significant vehicle oscillation or even instability, no reliable way to identify driving, and vehicle position/course/altitude control, and achieve the effect of reducing error signals
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0014] The following discussion of the embodiments of the invention directed to a vehicle lateral control system that combines both vehicle dynamics control and kinematics control is merely exemplary in nature, and is in no way intended to limit the invention or its applications or uses.
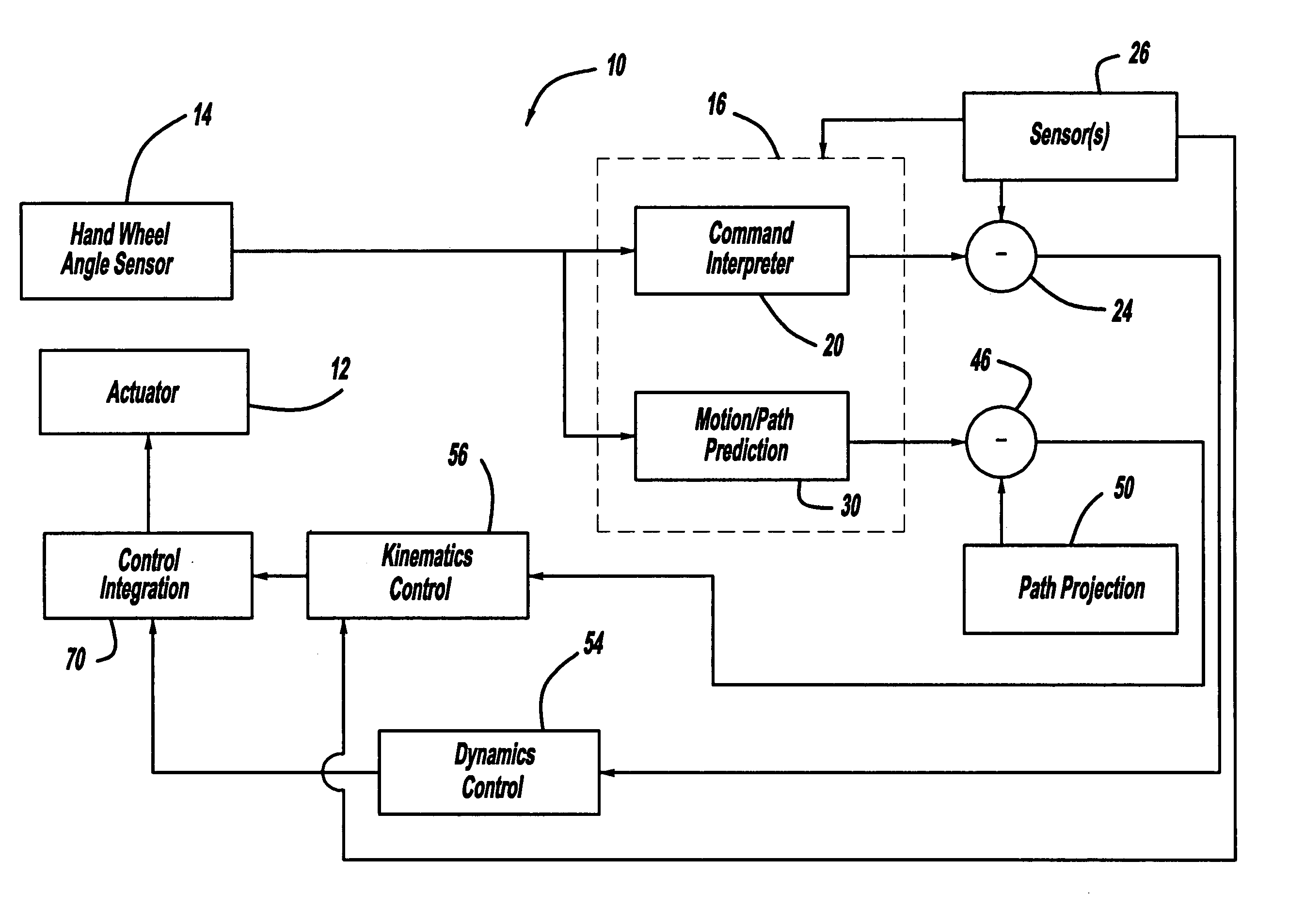
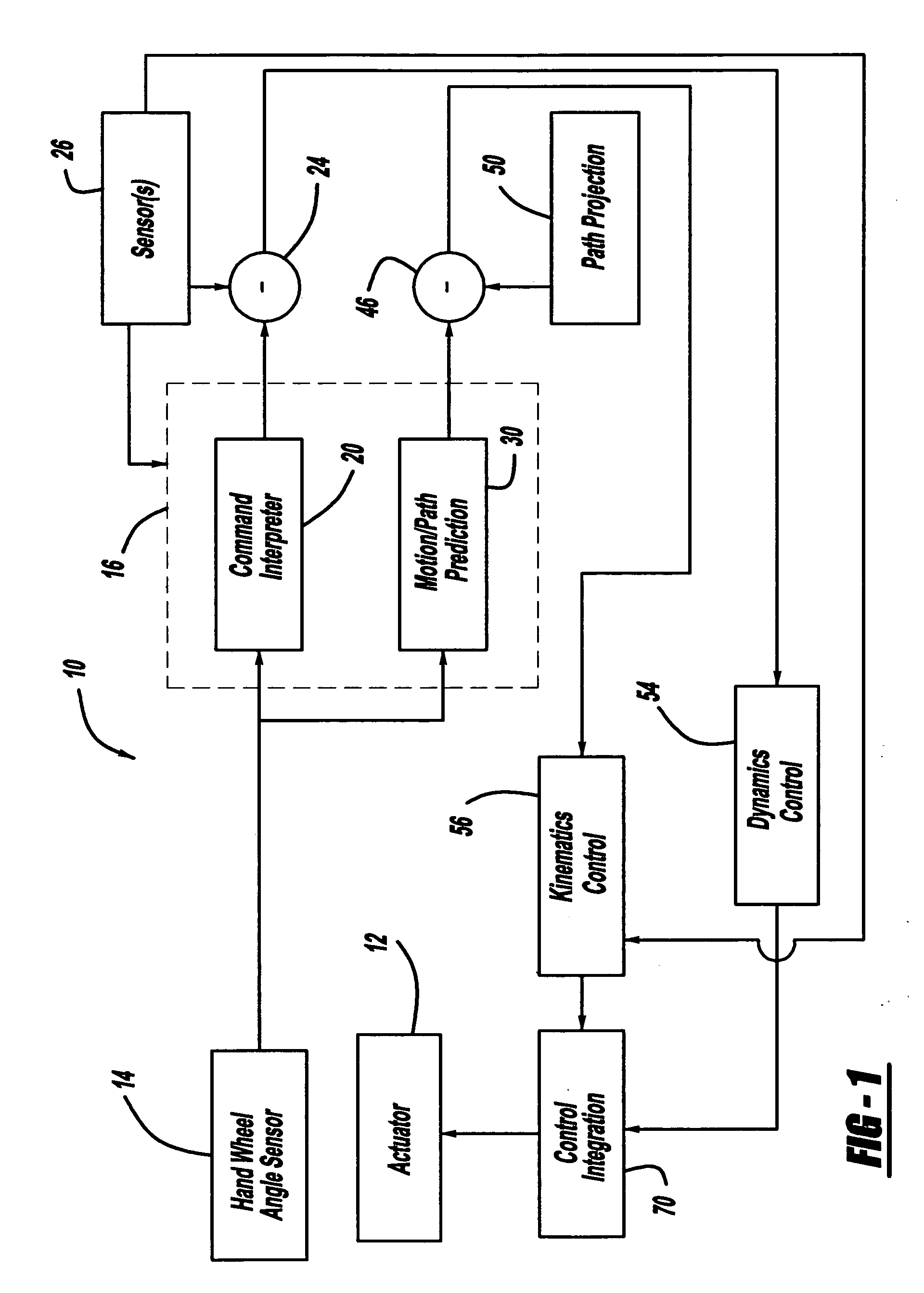
[0015]FIG. 1 is block diagram of a vehicle lateral stability control system 10, according to an embodiment of the present invention. As will be discussed in detail below, the control system 10 combines both vehicle dynamics control and vehicle kinematics control to improve the stability control of the vehicle and path tracking performance. Various vehicle sensors are used to provide the dynamics control, including a yaw rate sensor, a lateral acceleration sensor and a vehicle speed sensor, and one or more of a vision system, a radar system and / or a map data base with a GPS sensor are used to provide the kinematics control. The vehicle dynamics control controls the vehicle yaw rate and / or side-slip (...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More