Motor temperature control using estimated motor temperature based on motor power dissipation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Benefits of technology
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0018] The following detailed description of the invention is merely exemplary in nature and is not intended to limit the invention or the application and uses of the invention. Furthermore, there is no intention to be bound by any theory presented in the preceding background of the invention or the following detailed description of the invention. In this regard, although the following system and method are described as being implemented in a flight control system, it will be appreciated that the system and method may be implemented in any one of numerous other devices and systems that use electric motors.
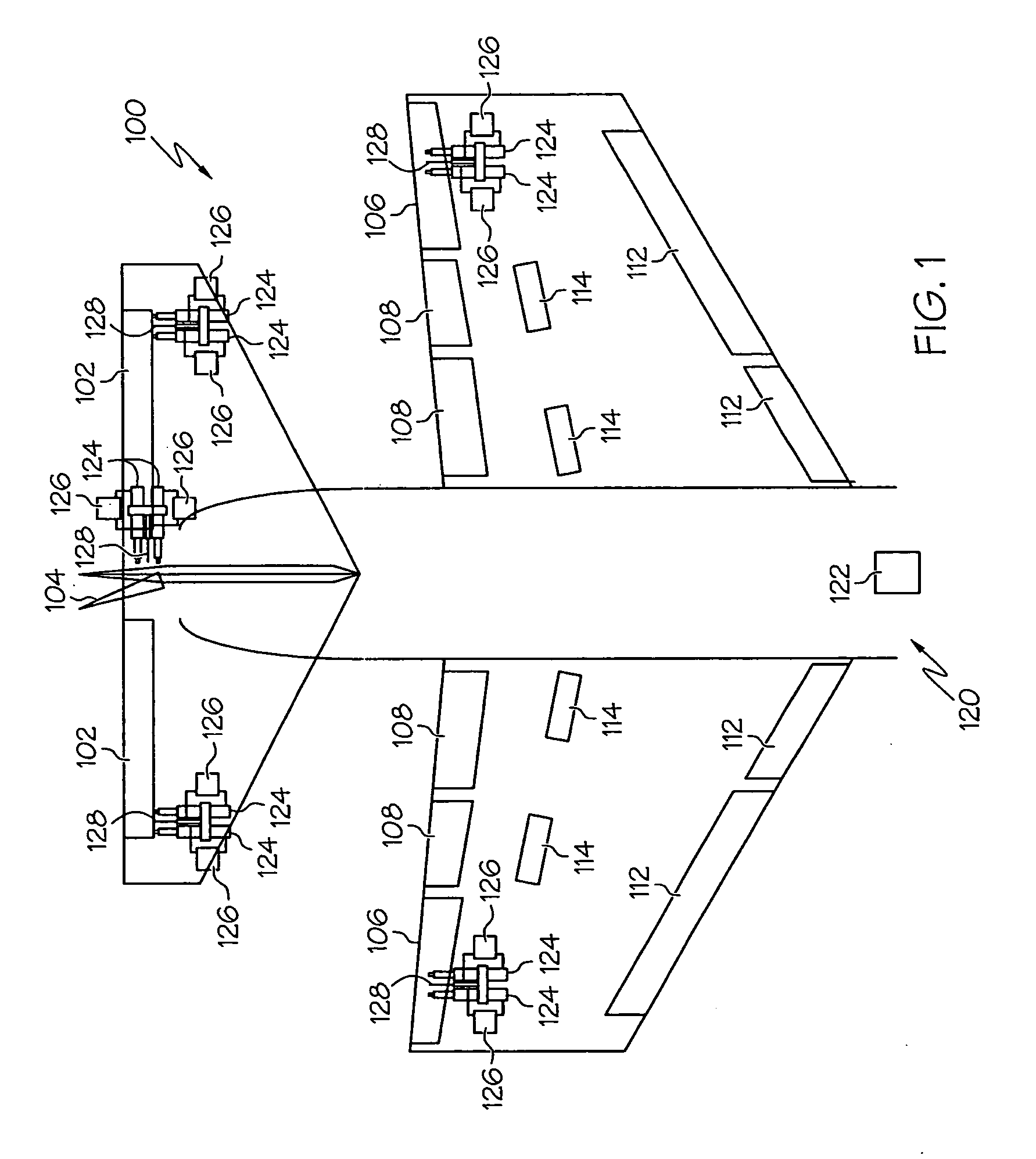
[0019] Turning first to FIG. 1, a schematic diagram of a portion of an exemplary aircraft and an exemplary flight control surface actuation system is shown. In the illustrated embodiment, the aircraft 100 includes a pair of elevators 102, a rudder 104, and a pair of ailerons 106, which are the primary flight control surfaces, and a plurality of flaps 108, slats 112, and spoilers 1...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More