

Method for three-dimensional human pose estimation
a human pose and three-dimensional technology, applied in the field of computer vision and pattern recognition, can solve the problems of limiting the application of real-time human-computer interaction on the platform of general hardware configuration, affecting the accuracy of human body models, and unable to achieve higher precision
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Benefits of technology
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
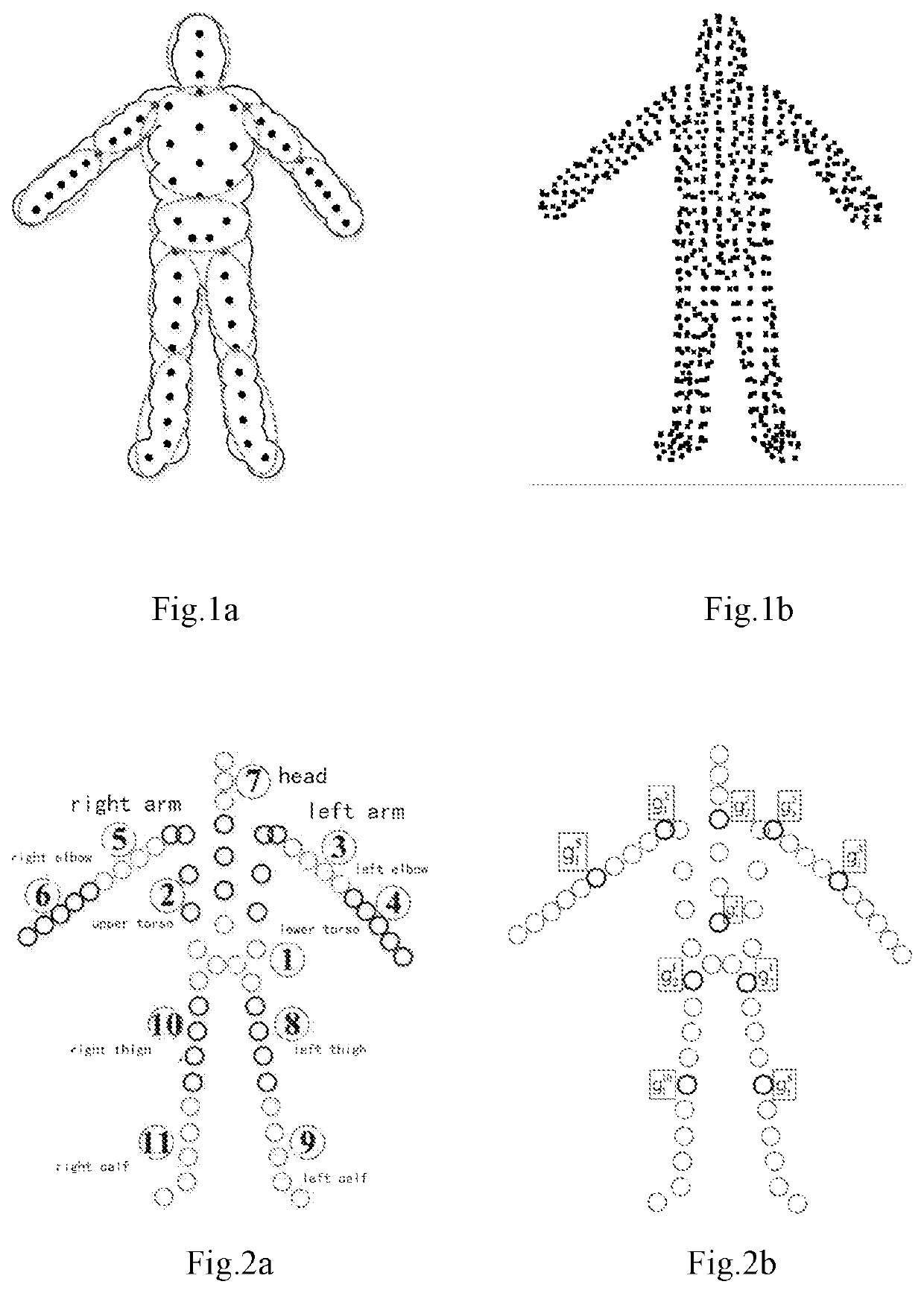
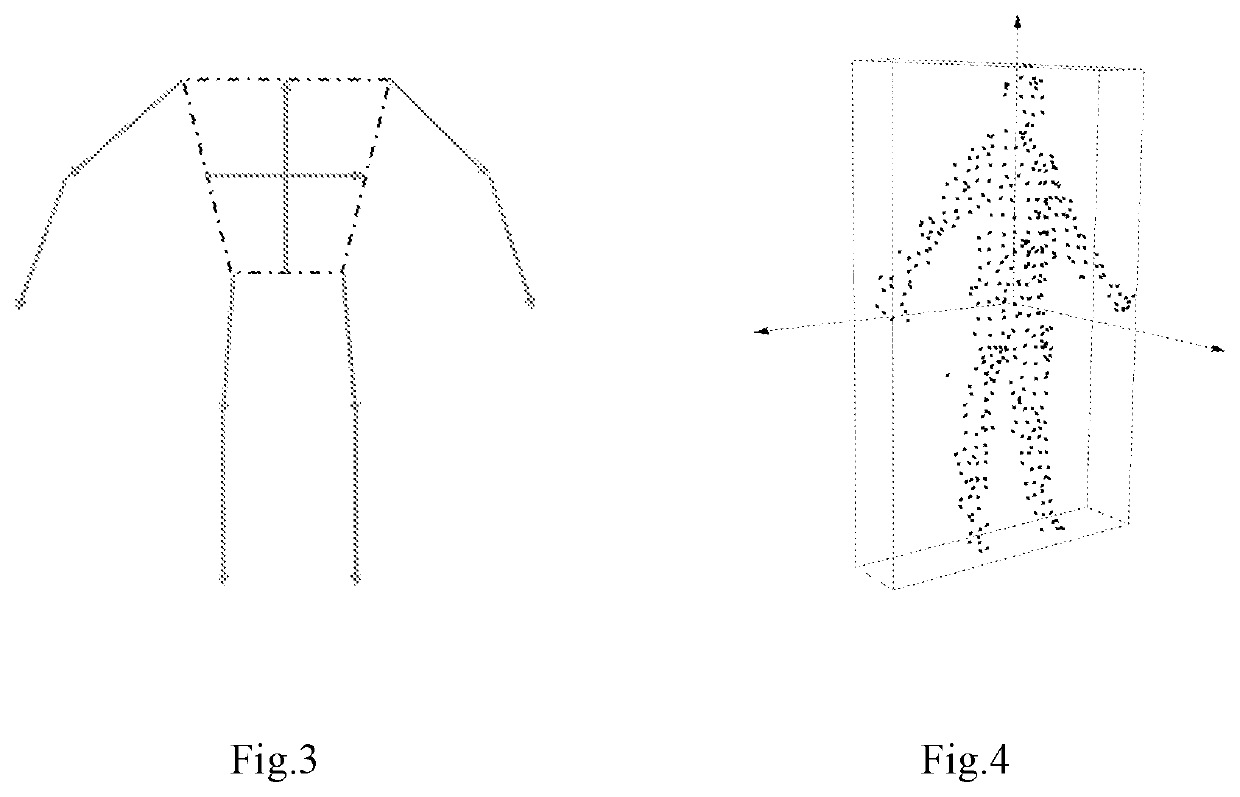
[0019]As shown as FIG. 8, in this method for three-dimensional human pose estimation, including the following steps:[0020](1) establishing a three-dimensional human body model matching the object, which is a cloud point human body model of visible spherical distribution constraint.[0021](2) Matching and optimizing between human body model for human body pose tracking and depth point cloud.[0022](3) Recovering for pose tracking error based on dynamic database retrieval.
[0023]The invention takes the depth map sequence as the input, optimizes and matches with the established 3D human body model and the 3D point cloud transformed from the depth map. The optimization process combines the global translation transformation and the local rotation transformation, and uses the dynamic database to recover the pose when the tracking error occurs, finally realizes the fast and accurate pose tracking, and obtains the estimated position of the joint points from the human body model. So the real-ti...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More