

Method and apparatus for positioning a bone prosthesis using a localization system
a bone prosthesis and localization system technology, applied in the field of surgical navigation systems, can solve the problems of gyroscopic-based surgical navigation systems that are not as well established, gyroscopic sensors that do not provide information as to position per se, and weakness in the leg
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Benefits of technology
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
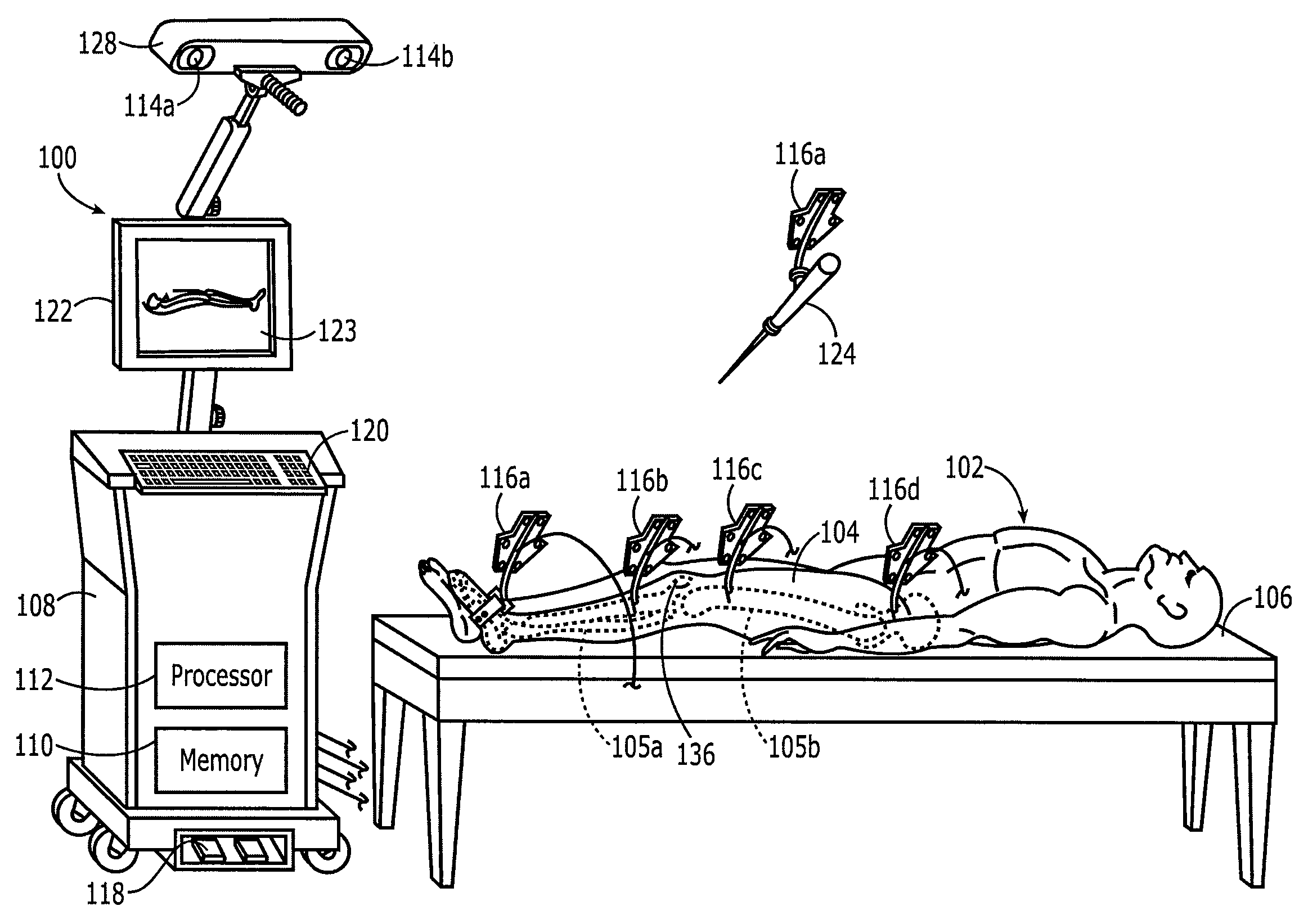
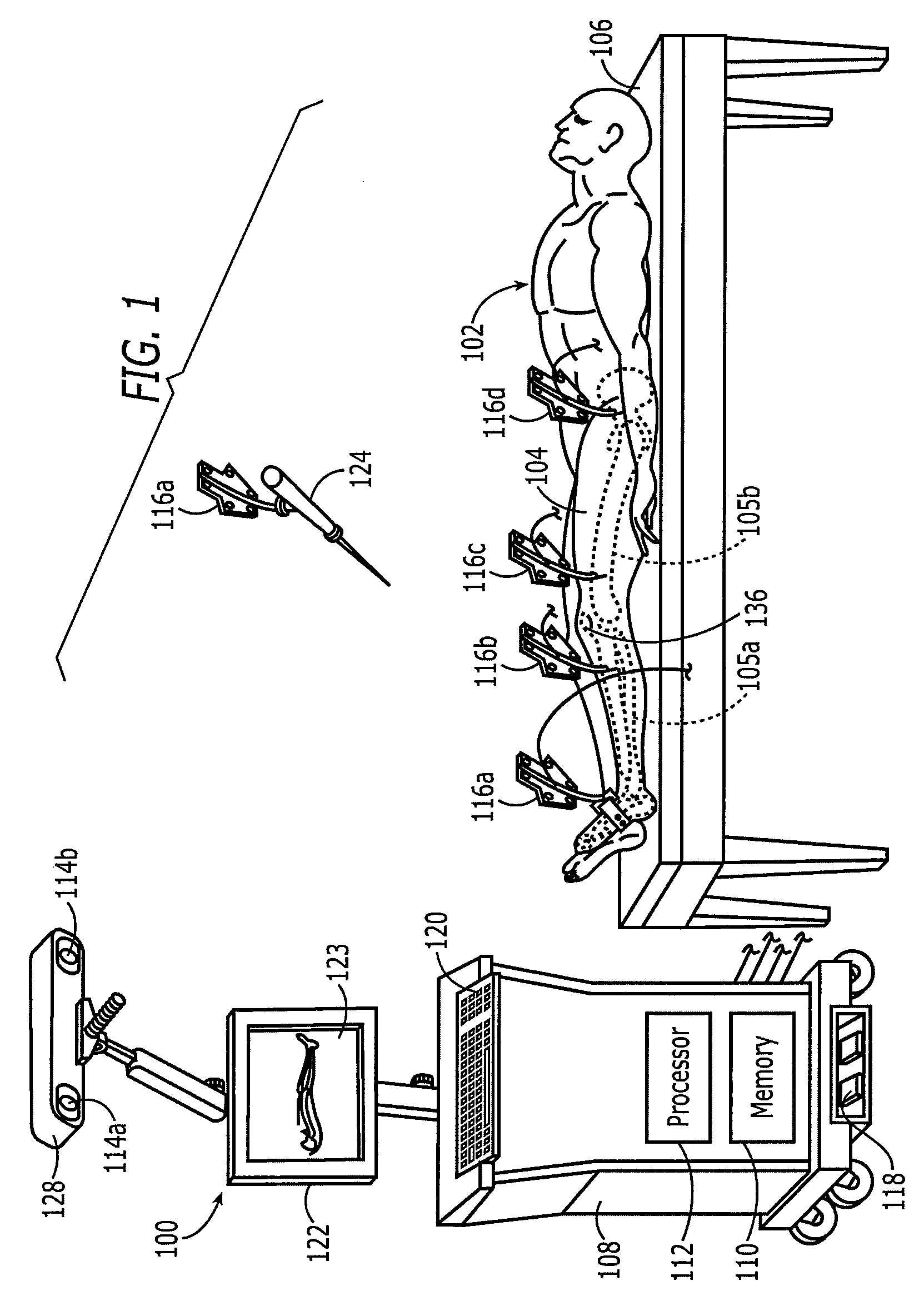
[0037]A description of a suitable optical localization device (surgical navigation system) for use in connection with the present invention is found in U.S. Pat. No. 6,385,475 to Cinquin et al., which is incorporated herein by reference. The invention will be described in connection with an infrared optical surgical navigation system such as disclosed in this patent. However, it should be understood that this is merely exemplary and that the present invention can be used in connection with many types of surgical navigation systems, including, but not limited to, surgical navigation systems that utilize optical, gyroscopic, electromagnetic, mechanical, and ultrasonic position / orientation sensing techniques.
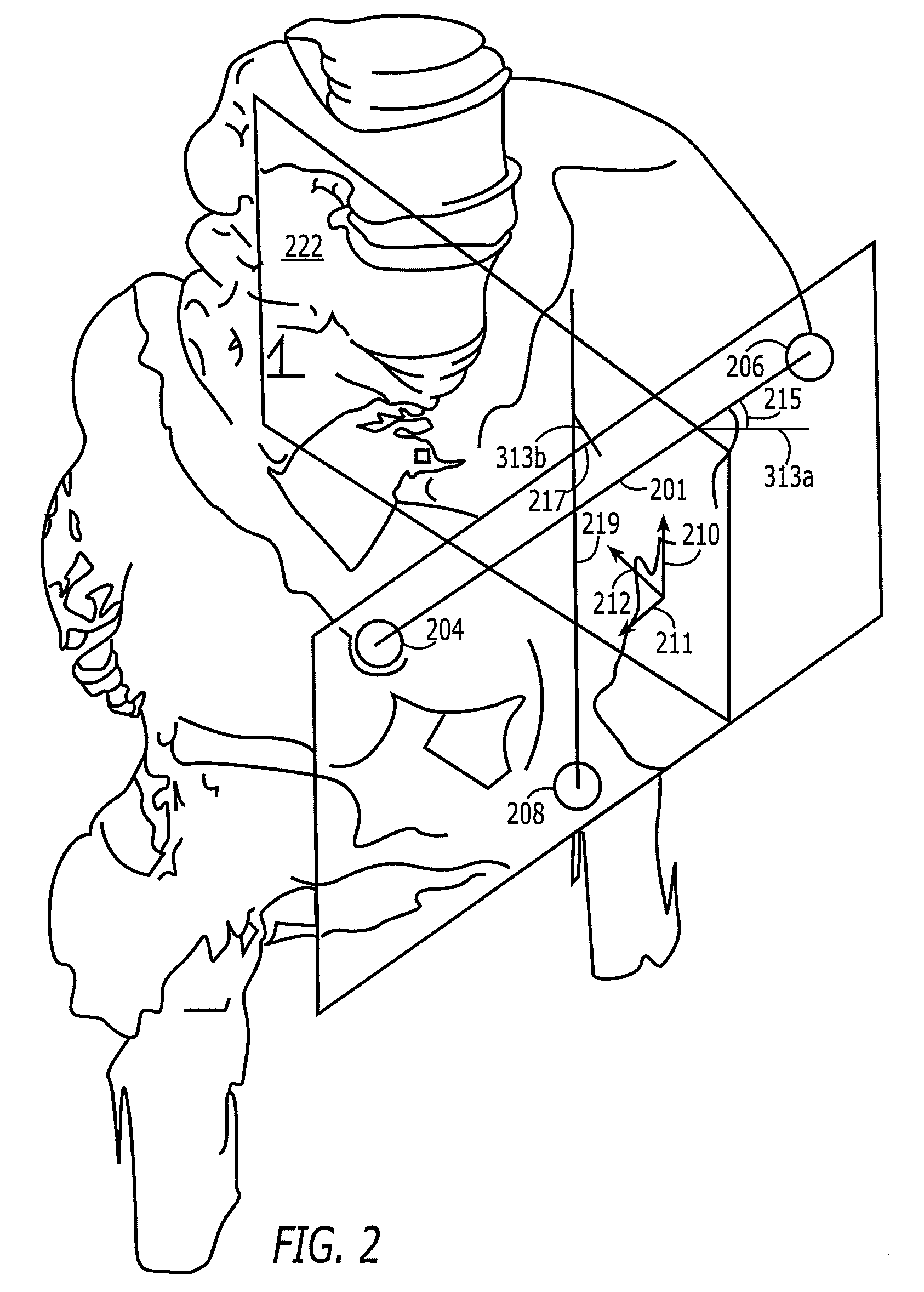
[0038]Below will be described the significant steps in an exemplary hip joint replacement surgical procedure utilizing concepts, methods, and apparatus in accordance with the present invention. It should be understood that the description is merely exemplary and that the invention ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More