

Three-translation and one-rotation parallel mechanism
A three-translation and parallel technology, which is applied in the direction of manipulators, program-controlled manipulators, manufacturing tools, etc., can solve problems such as inability to realize rotational motion, and achieve the effect of light moving parts, high acceleration, and large working space
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
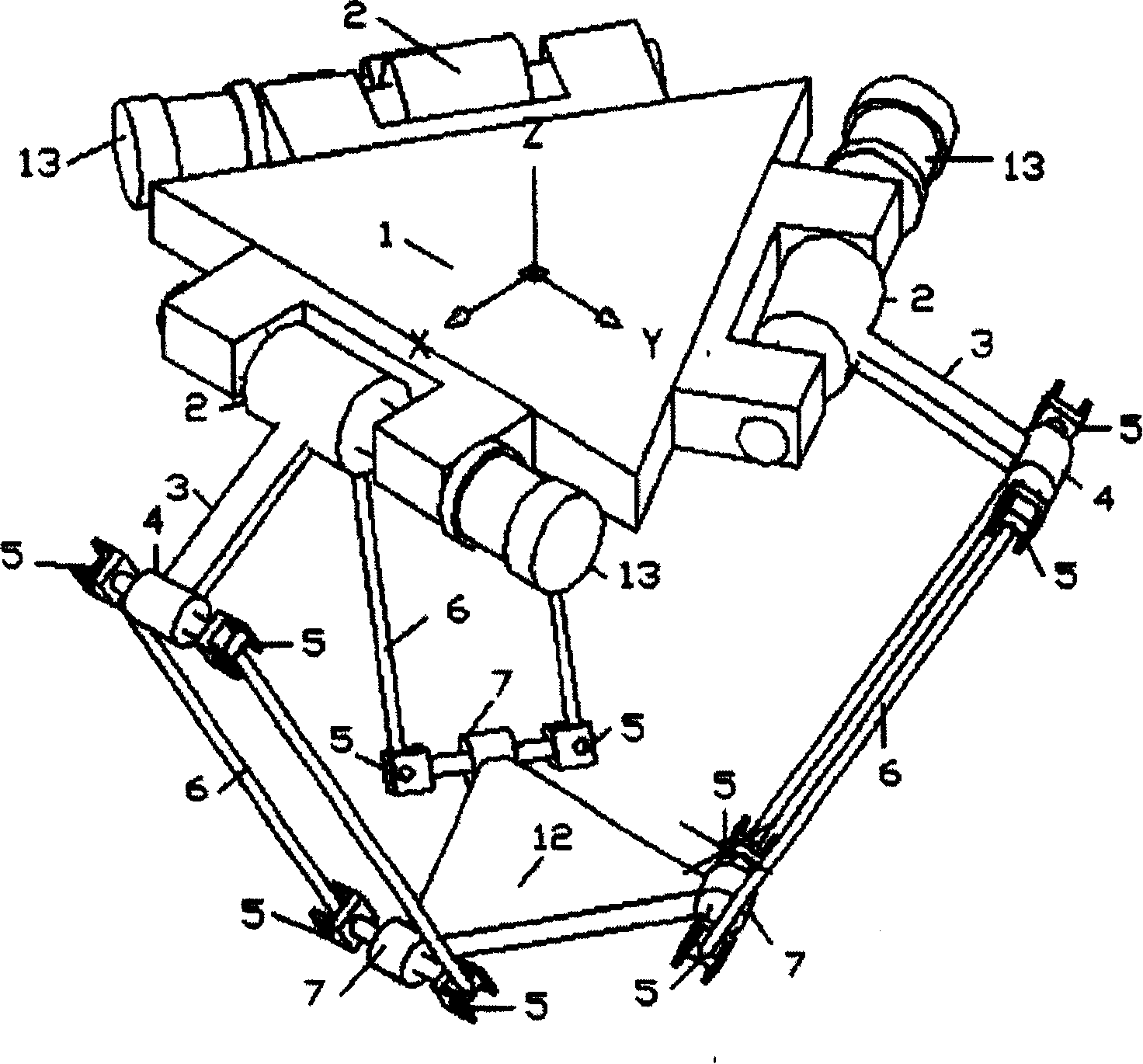
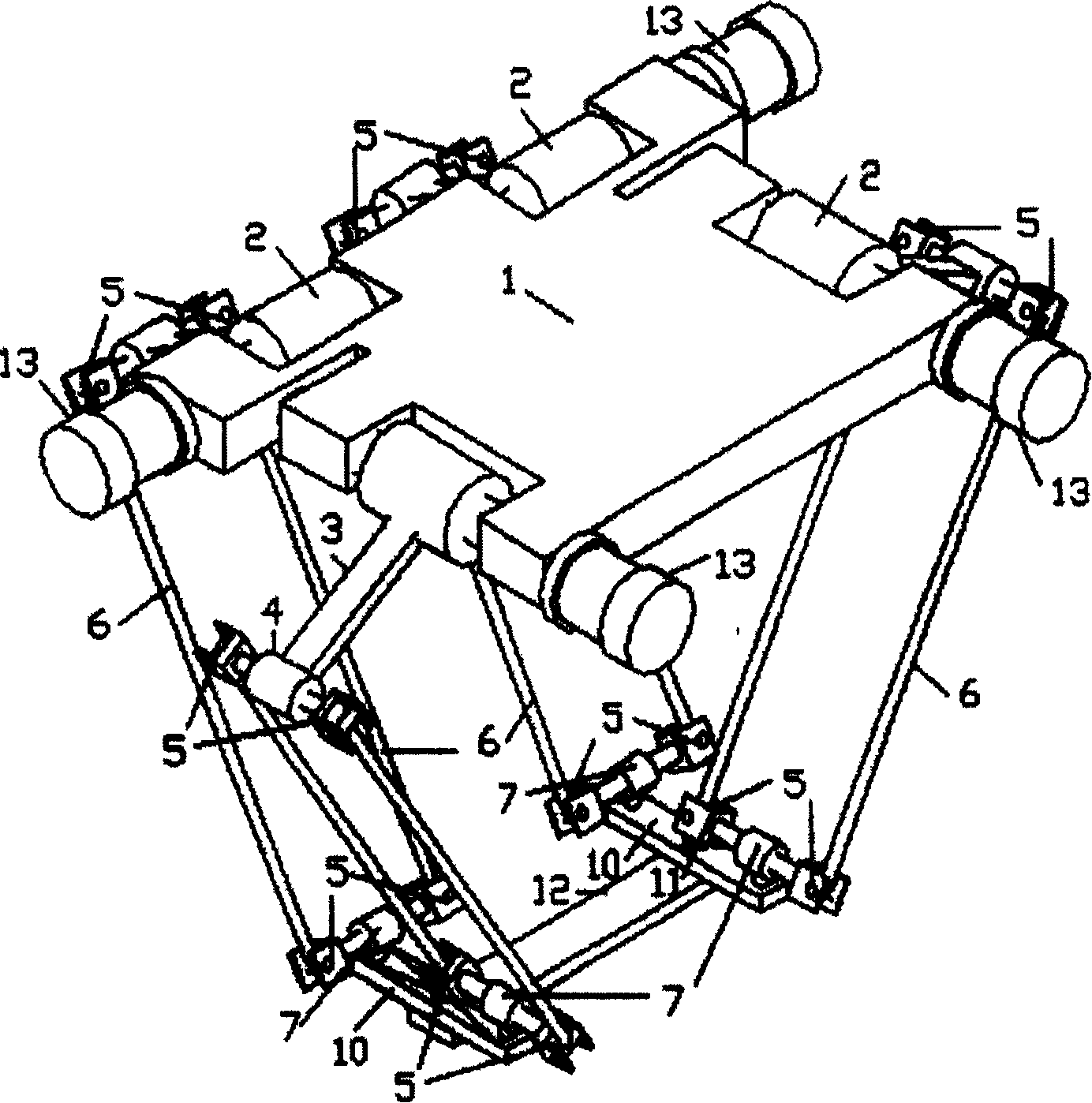
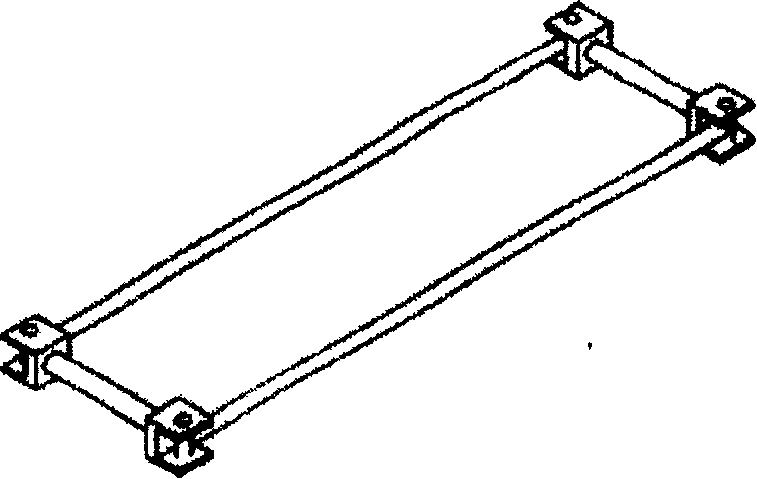
[0025] Figure 4 It is the first embodiment of the present invention. It can be seen from the figure that the four kinematic branch chains and the first rotating pair (2) connected to the static platform (1) are symmetrically arranged on the square static platform (1), wherein the structures of the first and third kinematic branch chains, See how Figure 6 shown. It can be seen from the figure that in the structure of the first branch chain, one end of the swing control arm (3) is connected with the static platform (1) through the first rotating pair (2), and the other end of the swing control arm (3) is connected through the second The swivel pair (4) is connected with the parallelogram hinge (6), and the first swivel pair (2) and the second swivel pair (4) are arranged parallel to each other. The third rotating pair (7) connects the parallelogram hinge (6) and the moving platform (12), and its axis is parallel to the first rotating pair (2). The structure of the third br...
Embodiment approach 2
[0033] Introduce another embodiment of the present invention below, please refer to Figure 8 Shown is another embodiment of the present invention. In this scheme, the components and connection sequence of each branch chain remain unchanged. The difference is that the rotation axes of the two rotating pairs (9) in the second and fourth motion branch chains are not coaxially arranged on the moving platform, but they are all kept parallel to the axis of the first rotating pair (2) of the first branch chain . The advantages and disadvantages of the coaxial and non-coaxial arrangement schemes in terms of mechanism performance are: the coaxial arrangement scheme has a symmetrical structure, the force on the moving platform is average, the movement precision of the mechanism is high, and the error is small; however, due to the second, The end link bar (8) in the four motion branch chains keeps translation all the time, and the second and fourth branch chains do not affect the rota...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More