Robot hand biomimetic finger flexible contact sensor array
A technology of contact sensor and robot hand, which is applied in the field of robot bionics, can solve the problems of not being able to imitate the function of feeling and forgetting, and can only measure contact force, etc., and achieve the effect of improving anti-interference performance, reducing the number of external leads, and reducing miniaturization
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
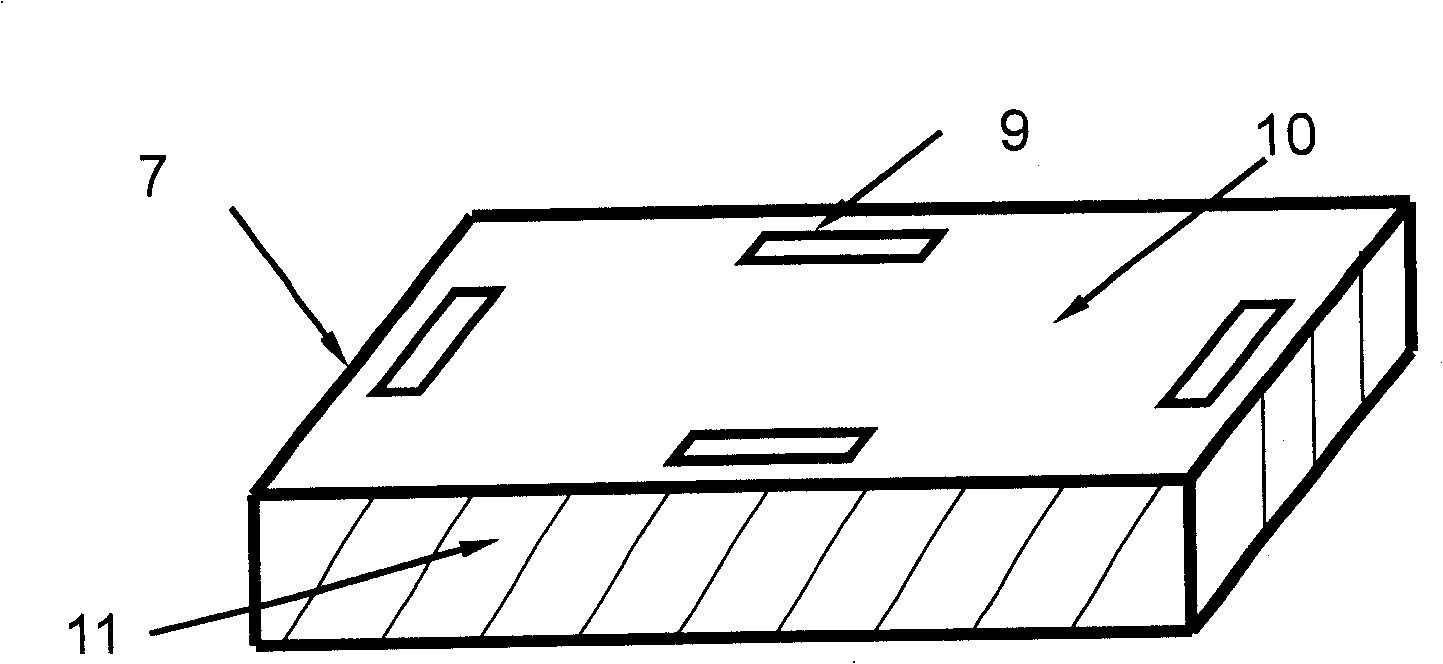
[0031] Miniature air pressure sensor 7, the sensitive element below the miniature air pressure sensor sensitive element 9 leads electrode 13 according to figure 2 In the manner shown, it is soldered to the sensor substrate 3 by surface mount technology, and the area of the miniature air pressure sensor 7 is 1×1mm to 2.2×2.2mm, and the thickness is 1mm to 2mm.
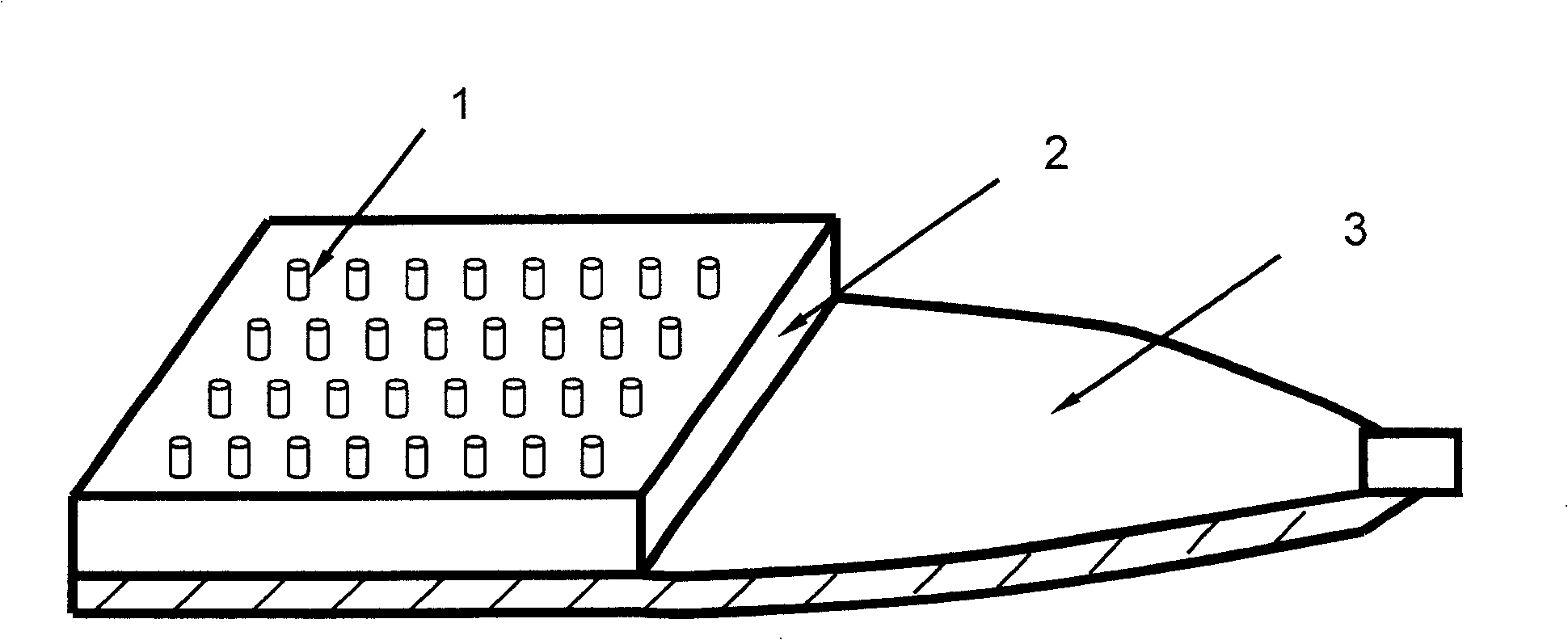
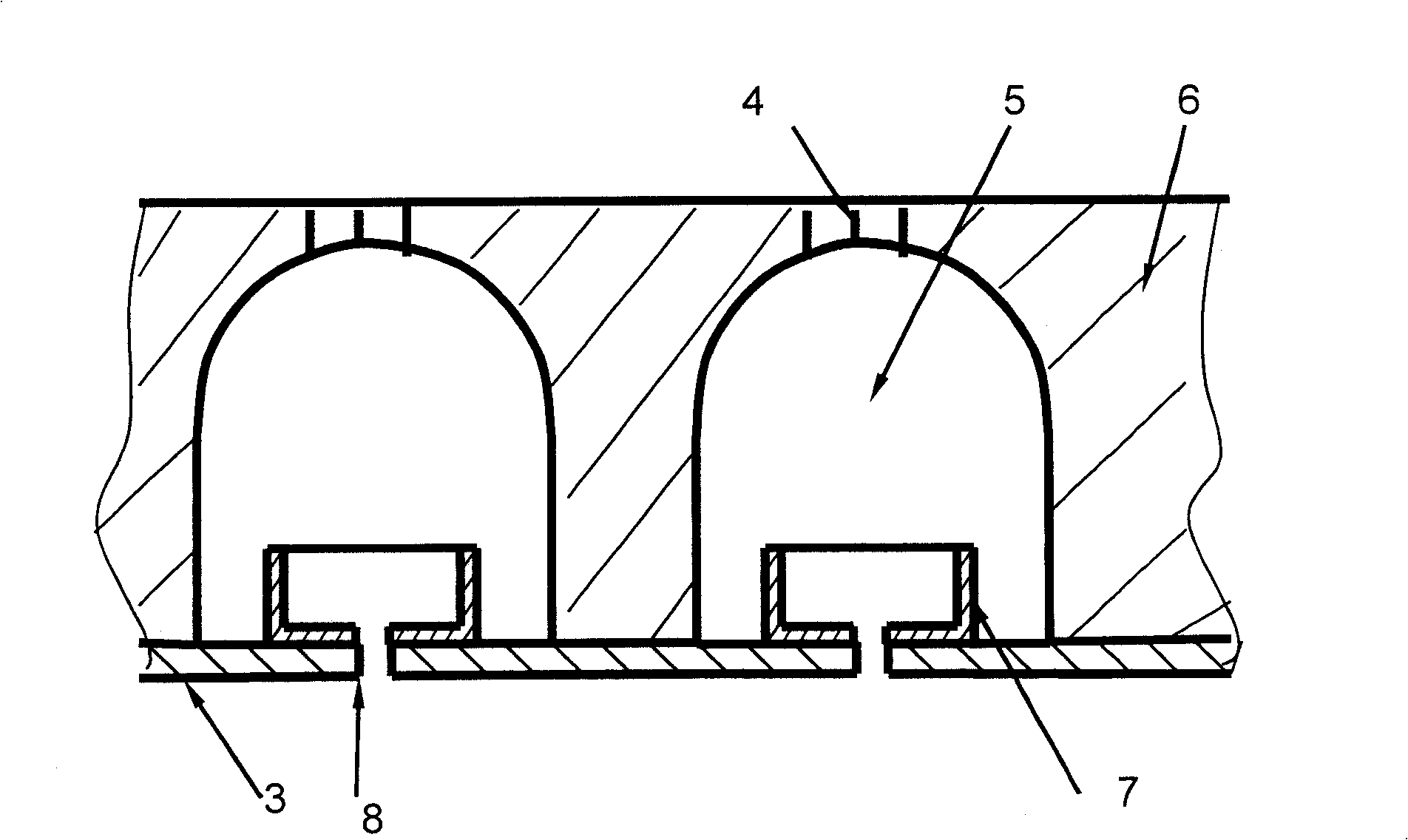
[0032] The flexible silicone colloid 6 that contains the miniature soft air bag 5 that flexible silicone cavity forms is according to figure 2 The way shown is pasted on the sensor substrate 3 to complete the assembly work of the whole sensor, forming a figure 1 The biomimetic finger surface flexible touch sensor array 2 is shown.
[0033] When a force is applied to the flexible silica gel 6, the micro soft airbag 5 formed by the flexible silica gel cavity deforms, the air in the miniature soft airbag 5 is compressed, and the ratio of the air pressure therein to the air pressure in the reference chamber 11 of the m...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com