

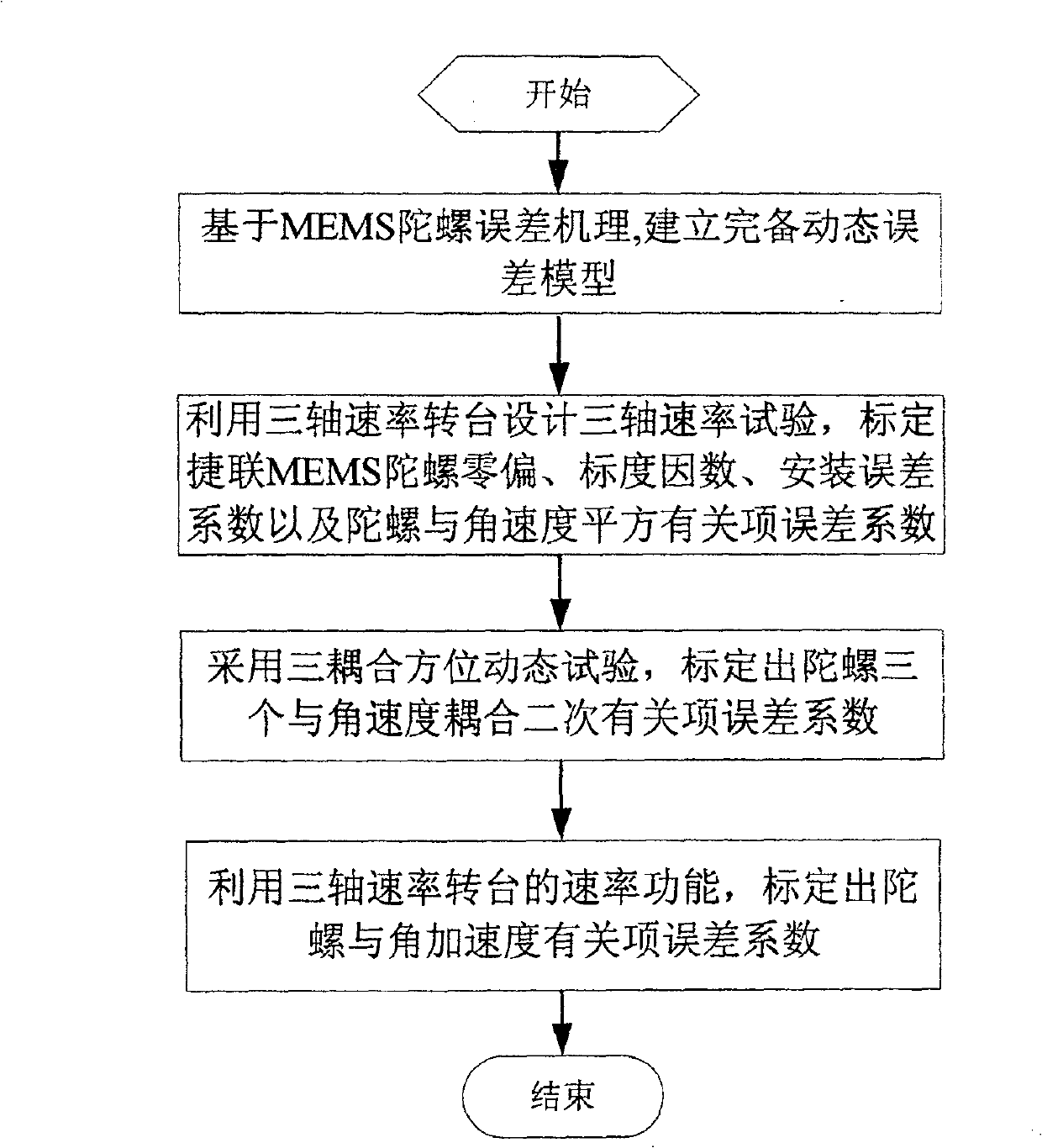
Method for calibrating connected MEMS gyro dynamic error
A dynamic error and calibration method technology, which is applied in the direction of rotating gyroscopes, measuring devices, instruments, etc., can solve problems such as low precision, large calibration errors, and large drift of strapdown MEMS gyroscopes.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
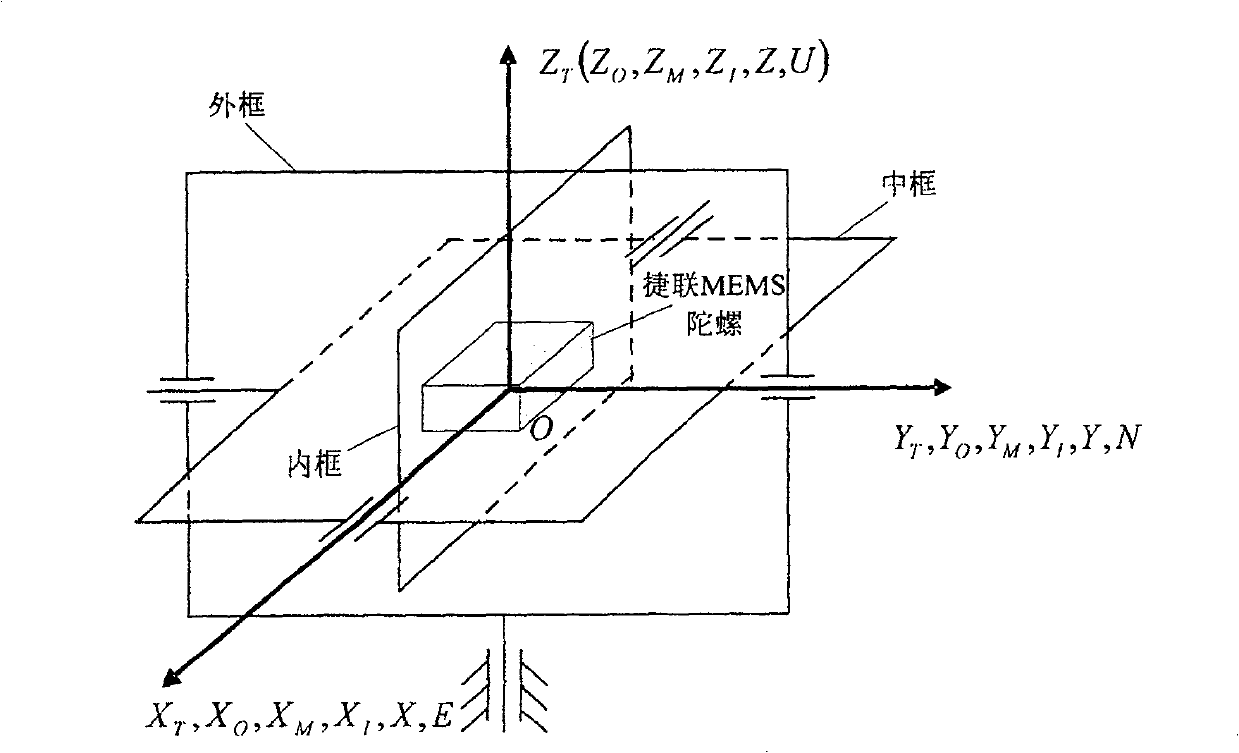
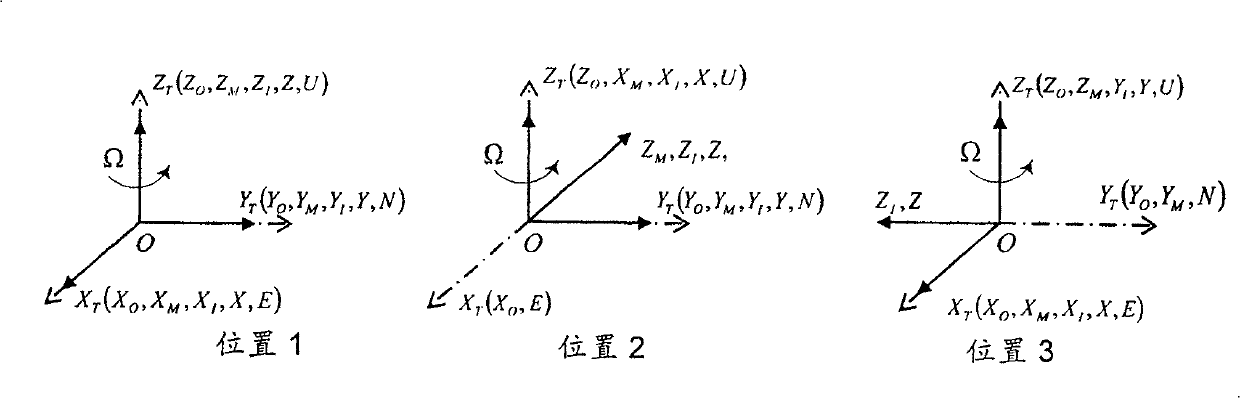
[0057] like figure 1 As shown, what the embodiment of the present invention adopts is a kind of double frame type silicon MEMS gyroscope, at first define each coordinate system utilized in the specific implementation process, as figure 2 As shown, the base coordinate system of the three-axis turntable is OX T Y T Z T , coincides with the geographic coordinate system OENU, and the outer frame coordinate system is OX O Y O Z O , the middle frame coordinate system is OX M Y M Z M , the inner frame coordinate system is OX I Y I Z I , the gyro coordinate system is OXYZ. The MEMS gyro strapdown is installed on the inner frame, that is, the gyro coordinate system OXYZ is always consistent with the inner frame coordinate system OX I Y I Z I coincide. OX I Pointing to the axial direction of the inner frame, OY M Pointing to the axis of the middle frame, OZ O Pointing to the axial direction of the outer frame, the specific implementation steps are as follows:
[0058...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More