

Controller
一种控制装置、控制对象的技术,应用在程序控制、自适应控制、电动控制器等方向,能够解决力控制增益性能差、无法进行插入、力控制性能差等问题,达到通用性高的效果
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
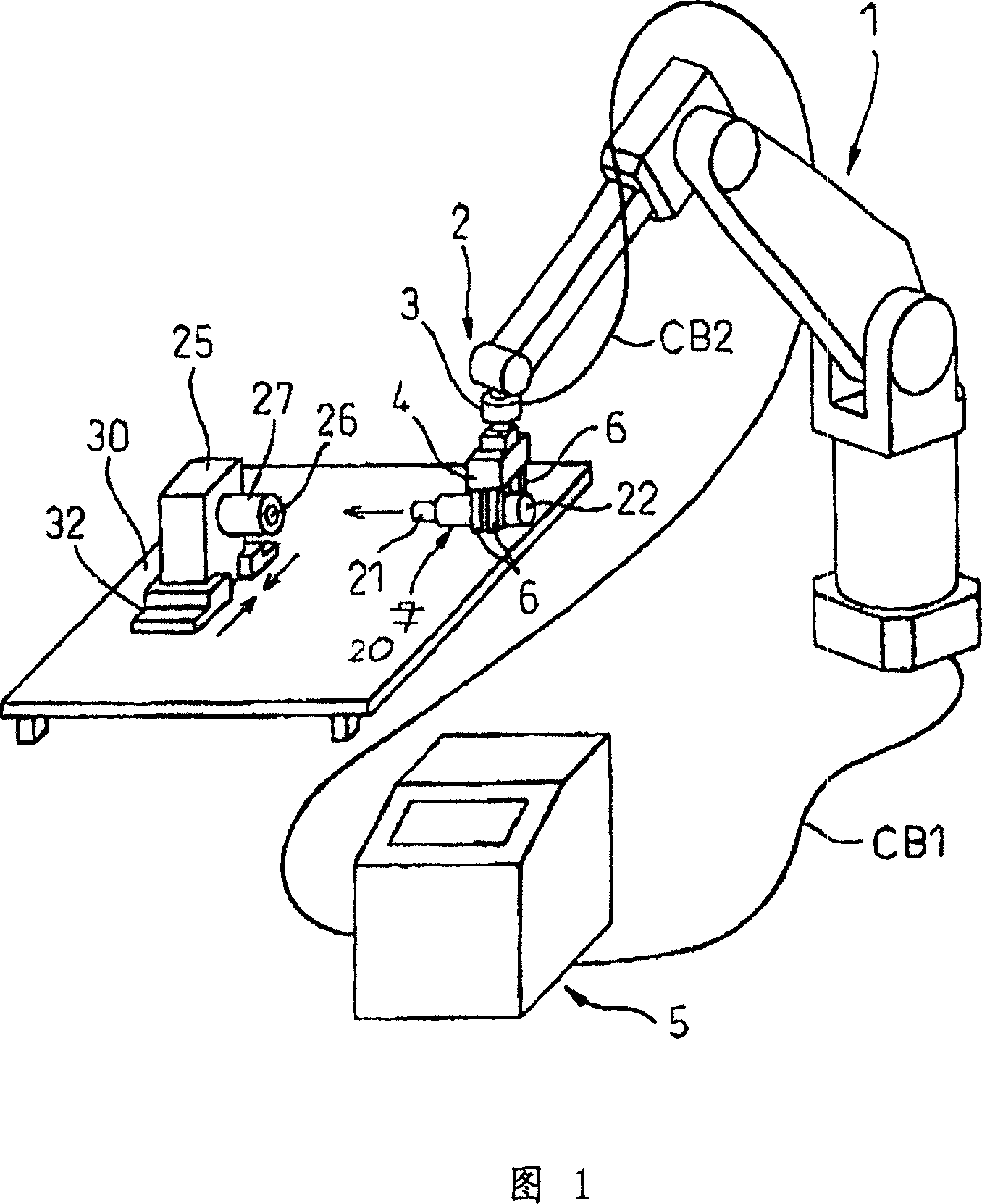
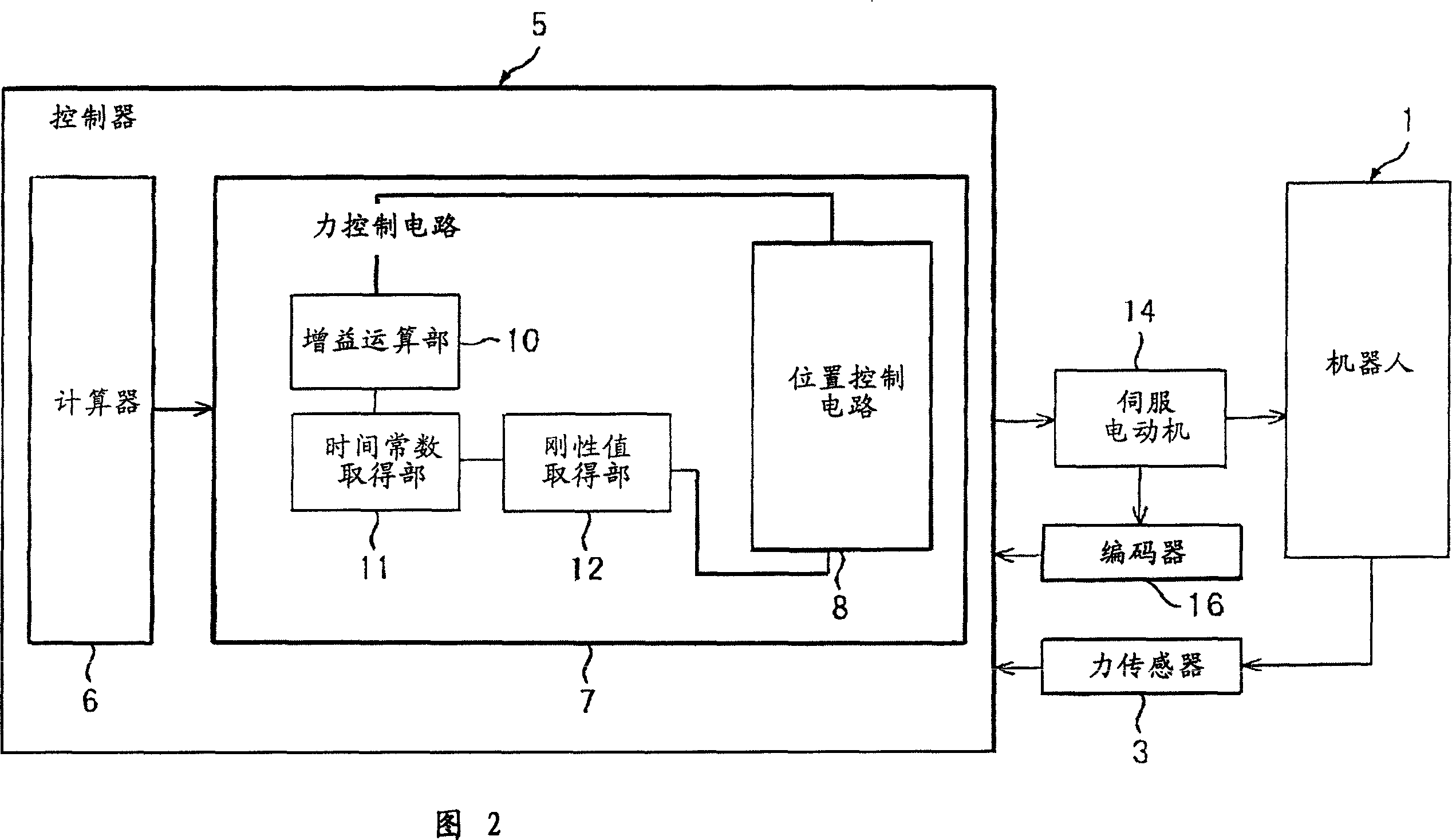
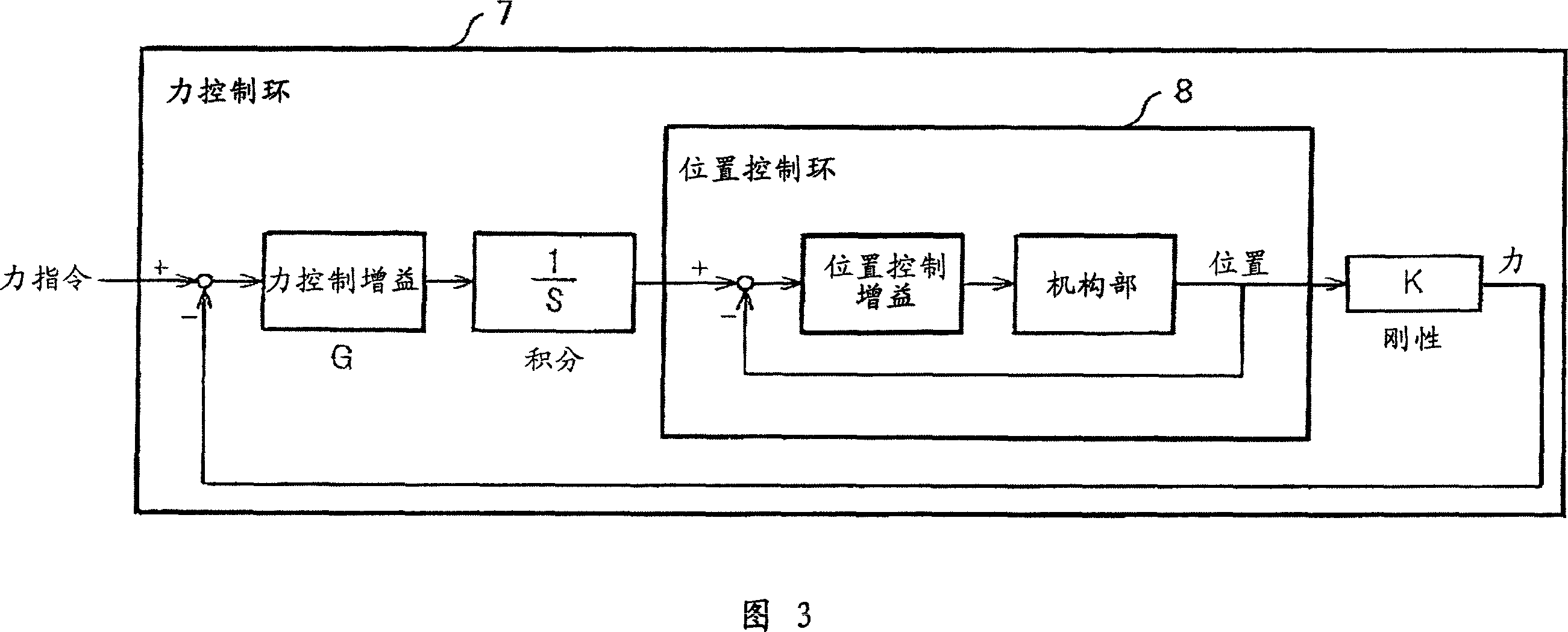
[0027] Next, the robot control device (control device) of the present invention will be described with reference to the drawings. Figure 1 shows a six-axis robot that translates three axes and rotates three axes as the control object. Control devices for force controlling the illustrated robot etc. are broadly classified into a system having a position control circuit connected in series inside the force control circuit and a system having a position control circuit connected in parallel outside the force control circuit. The control device of the present invention ( FIG. 2 ) can control the force of the contact state between the robot (control object) and the target workpiece by targeting a system (see FIG. 3 ) having a position control circuit connected in series inside the force control circuit, and The force control gain can be automatically set according to the time constant (delay) of the position control circuit and the mounting rigidity of the robot and target workpiec...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More