

Parking assist method and parking assist apparatus
An auxiliary device and parking technology, applied in the direction of radio wave measurement system, using re-radiation, road network navigator, etc., can solve the problems of parking space designation, inability to calculate target trajectory, etc., and achieve the effect of easy grasp
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
no. 1 Embodiment approach
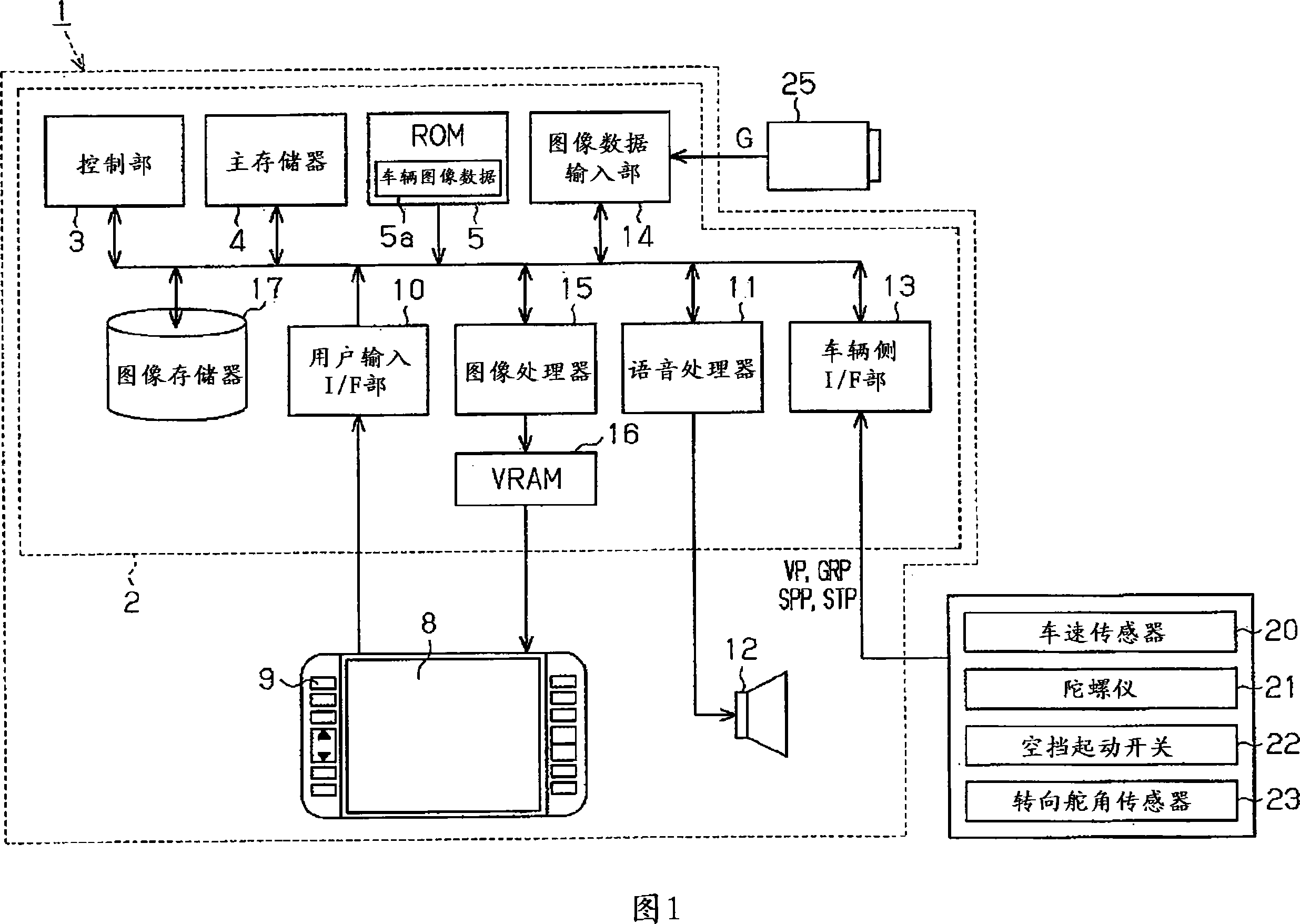
[0053] Next, an embodiment of a parking assist device according to the present invention will be described with reference to FIGS. 1 to 14 . FIG. 1 is a block diagram illustrating the configuration of a parking assist system 1 .
[0054] As shown in FIG. 1 , a parking assistance system 1 has a control device 2 as a parking assistance device. The control device 2 has a control unit 3 , a main memory 4 and a ROM 5 . The control unit 3 has a CPU (not shown) and the like, and performs main control of various processes in accordance with various programs such as a parking assist program stored in the ROM 5 . The main memory 4 temporarily stores calculation results of the control unit 3 and also stores various variables, flags, and the like used for parking assistance.
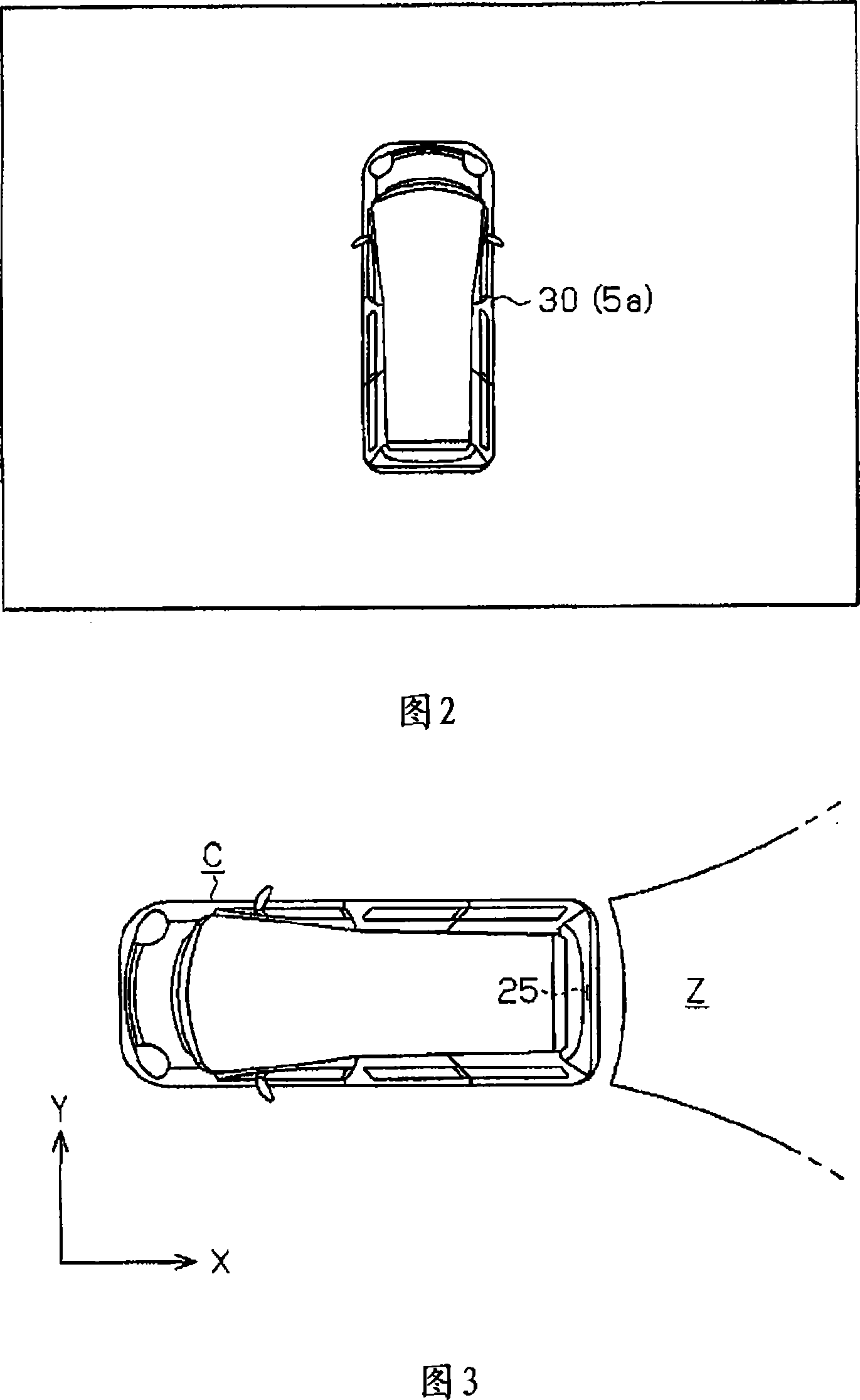
[0055] Vehicle image data 5 a is stored in ROM 5 . The vehicle image data 5 a is data for outputting an image of a vehicle (see FIG. 3 ) in which the parking assist system 1 is installed to the display 8 as a dis...
no. 2 Embodiment approach
[0099] Next, a second embodiment of the present invention will be described with reference to FIGS. 15 and 16 . In addition, since the structure of the second embodiment is changed only from the straight guide line St of the first embodiment, a detailed description of the same parts will be omitted.
[0100] In the drawing processing of the curve guide line Rv and the straight guide line St (see FIG. 11 ) in the second embodiment, the same processing as that in the first embodiment is performed in steps S5-1 to S5-6. Then, in step S5-7, the image processor 15 does not draw the straight guide line St, but draws the straight guide frame F serving as the expected position indicator. The straight-ahead guide frame F represents the external shape of the vehicle at a position where the vehicle C is parallel to the white line approximation expression Sg.
[0101] The straight guide frame F will be described with reference to FIG. 15 . The straight-ahead guide frame F is composed of...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More