

Error calibrating method for high dynamic, multivariate and asynchronous nonitoring system
An error calibration and monitoring system technology, applied in radio wave measurement systems, measurement devices, instruments, etc., can solve the problem of not considering time calibration, inability to apply error calibration, inability to error calibration and other problems
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
example 1
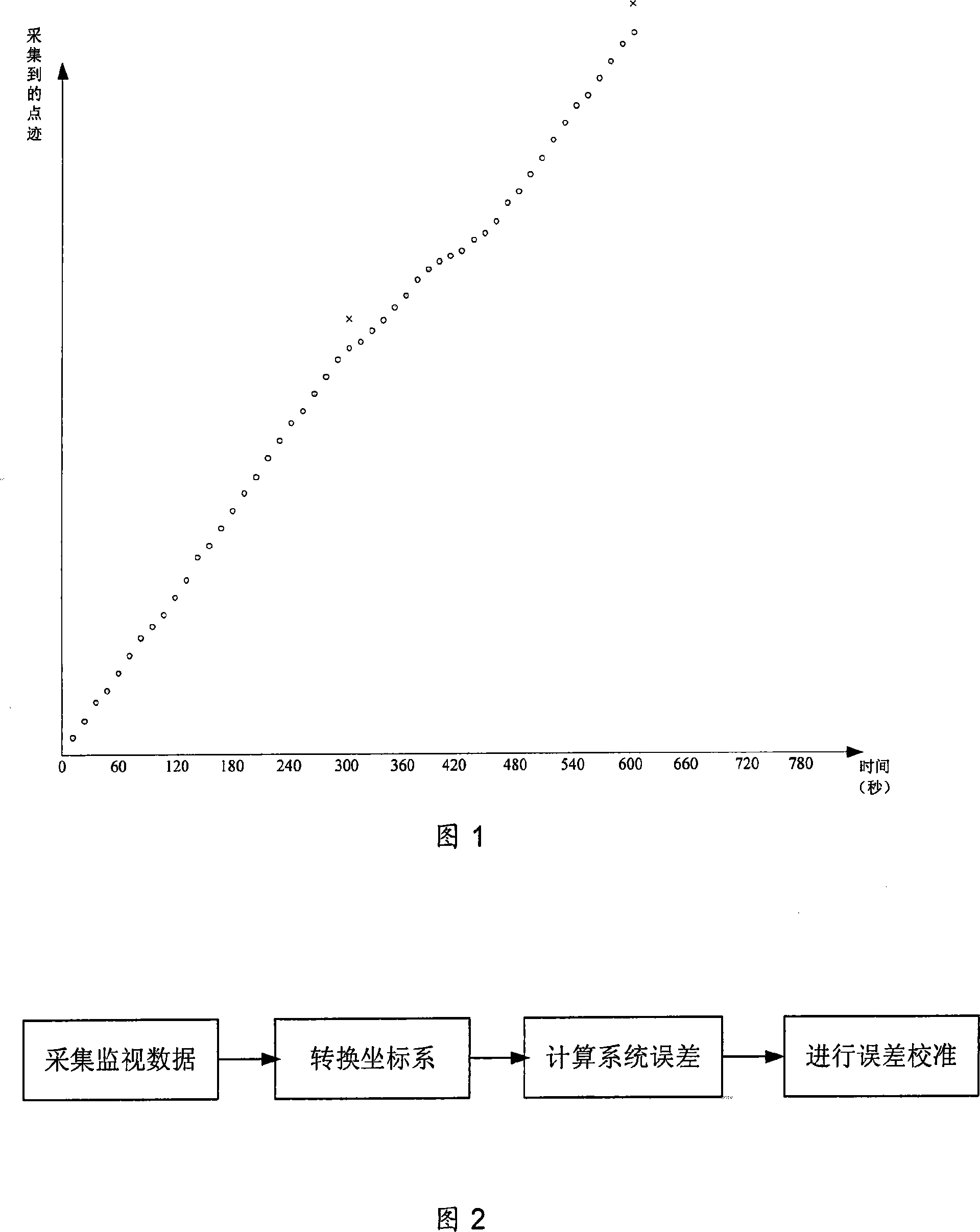
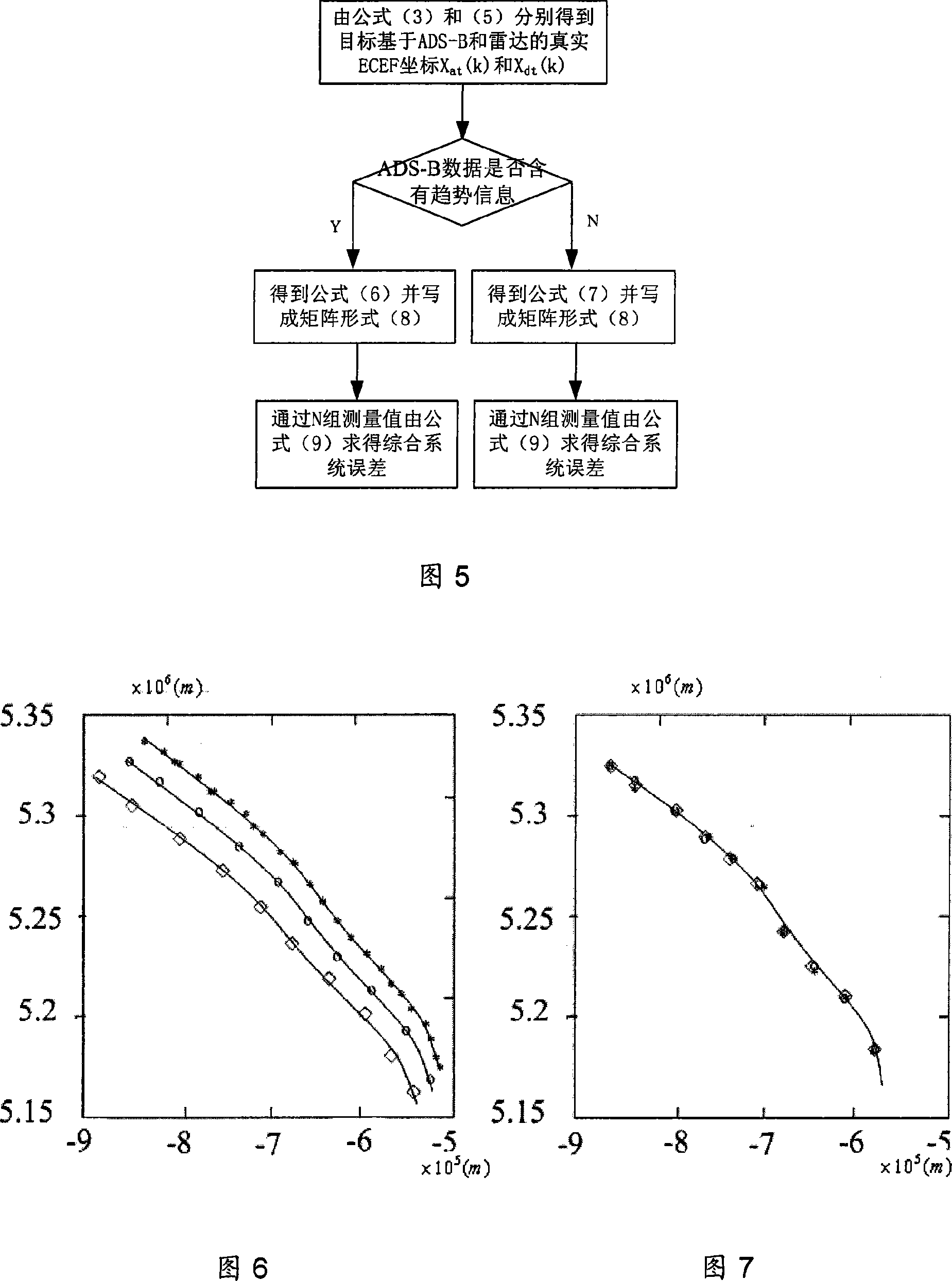
[0134] The monitoring data of waypoints are collected on the western air routes of my country for simulation test, and the earth model adopts WGS-84 model, e 2 =0.0066944, the position vector of the radar station is X s =[0.56882rad, 1.72795rad, 50m], the number of observation target points n=10, and the simulation results are shown in Table 1 and Figures 6 and 7.
[0135] Table 1 Residual system error after calibration in ECEF coordinate system
[0136] Coordinate System
Δλ(rad)
10 -6
Δφ(rad)
10 -6
Δh(m)
Δr(m)
Δθ(rad)
10 -4
Δη(rad)
10 -4
ECEF
1.276
3.168
-25
27
0
-0.435
[0137] The x-y plane in Figures 6 and 7 represents the equatorial plane of the earth, the origin is at the center of the earth, the positive semi-axis of the x-axis points from the center of the earth to the Greenwich meridian, and the positive semi-axis of the y-axis points from the center of the earth to the line of longi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More