

Active and passive type inner-mirror operation robot
A surgical robot, active and passive technology, applied to endoscopes, internal fixators, surgical forceps, etc., can solve the problems of difficult control, complex system structure, and high production costs
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0028] The specific implementation manners of the present invention are given below and described in conjunction with the accompanying drawings.
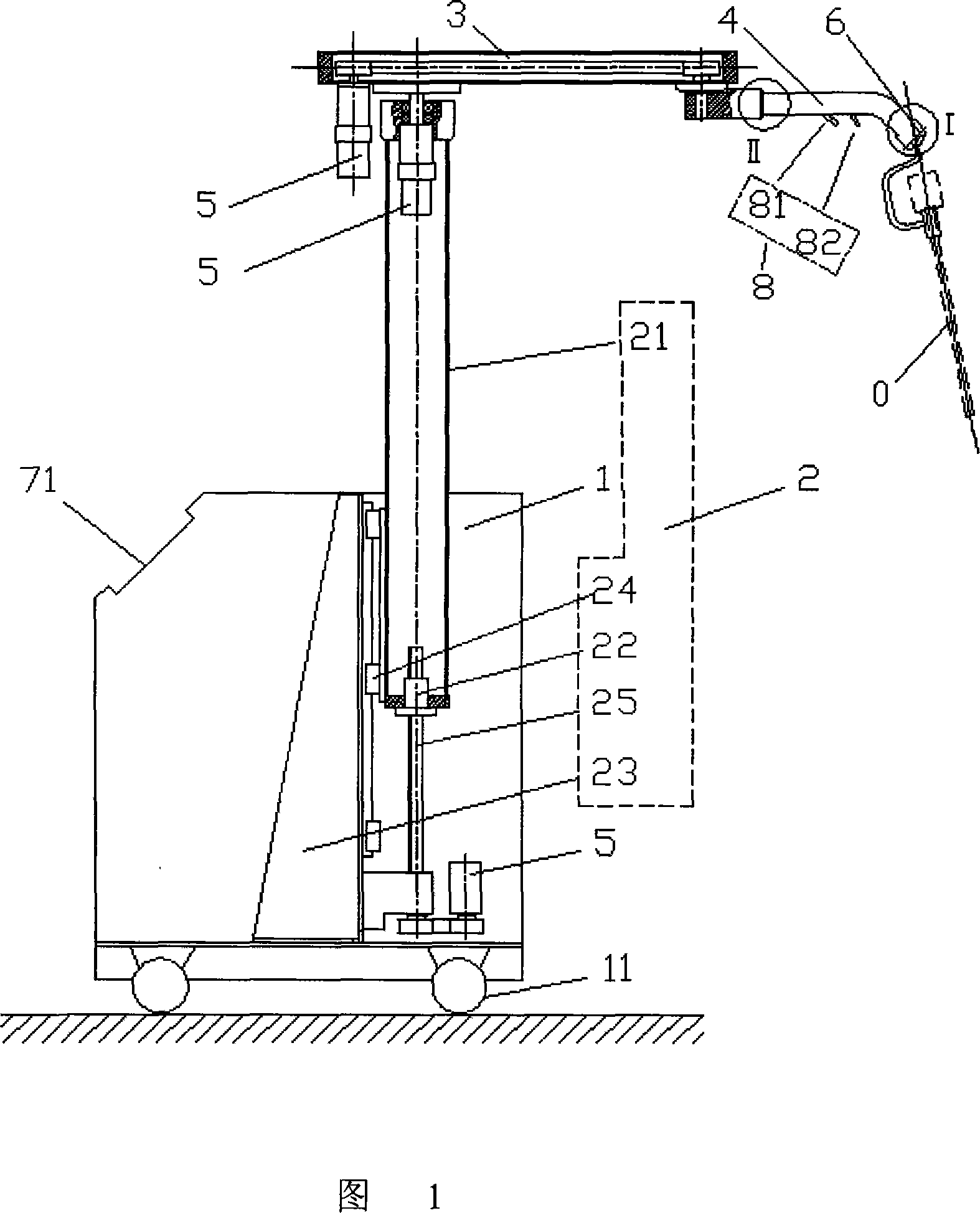
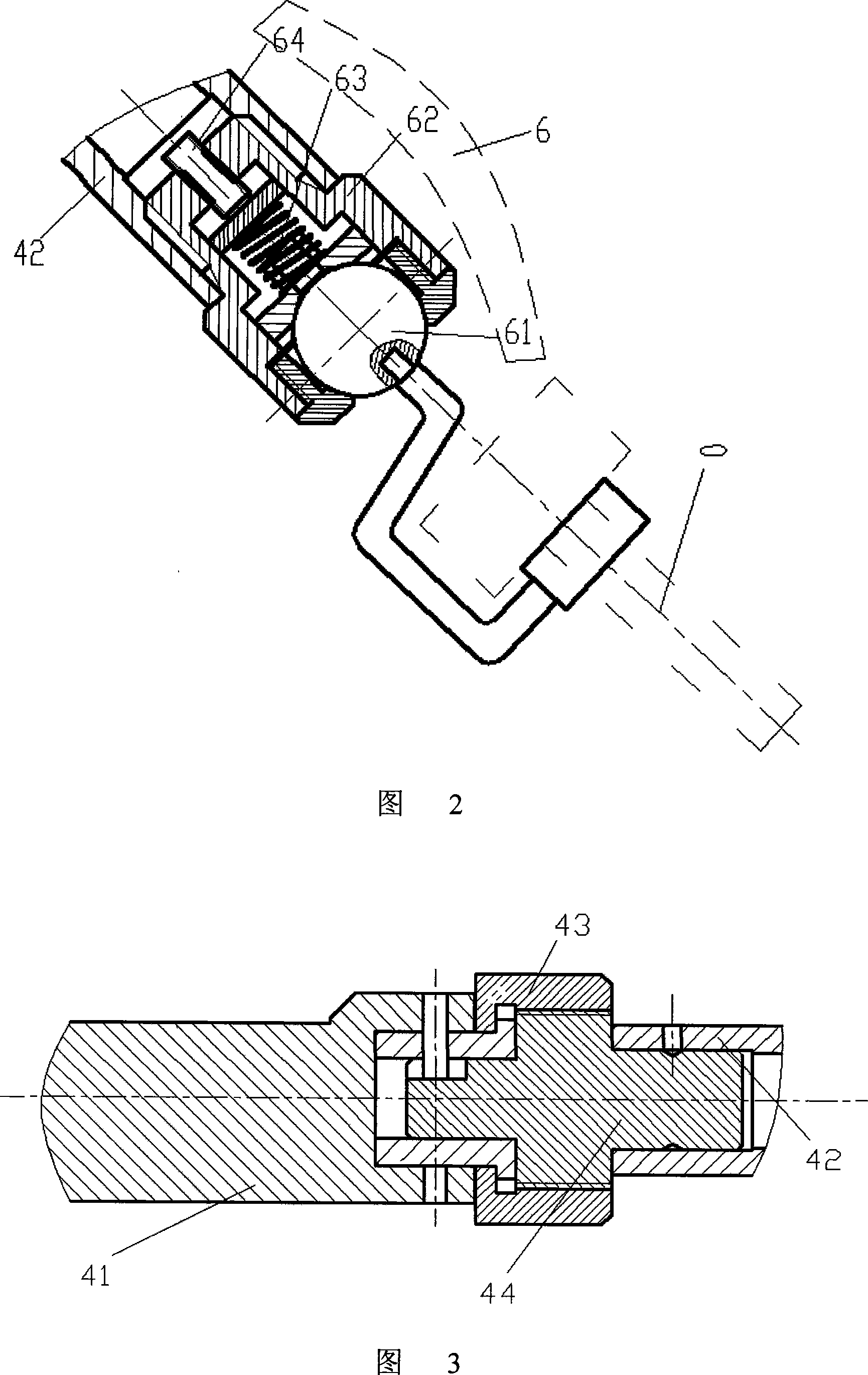
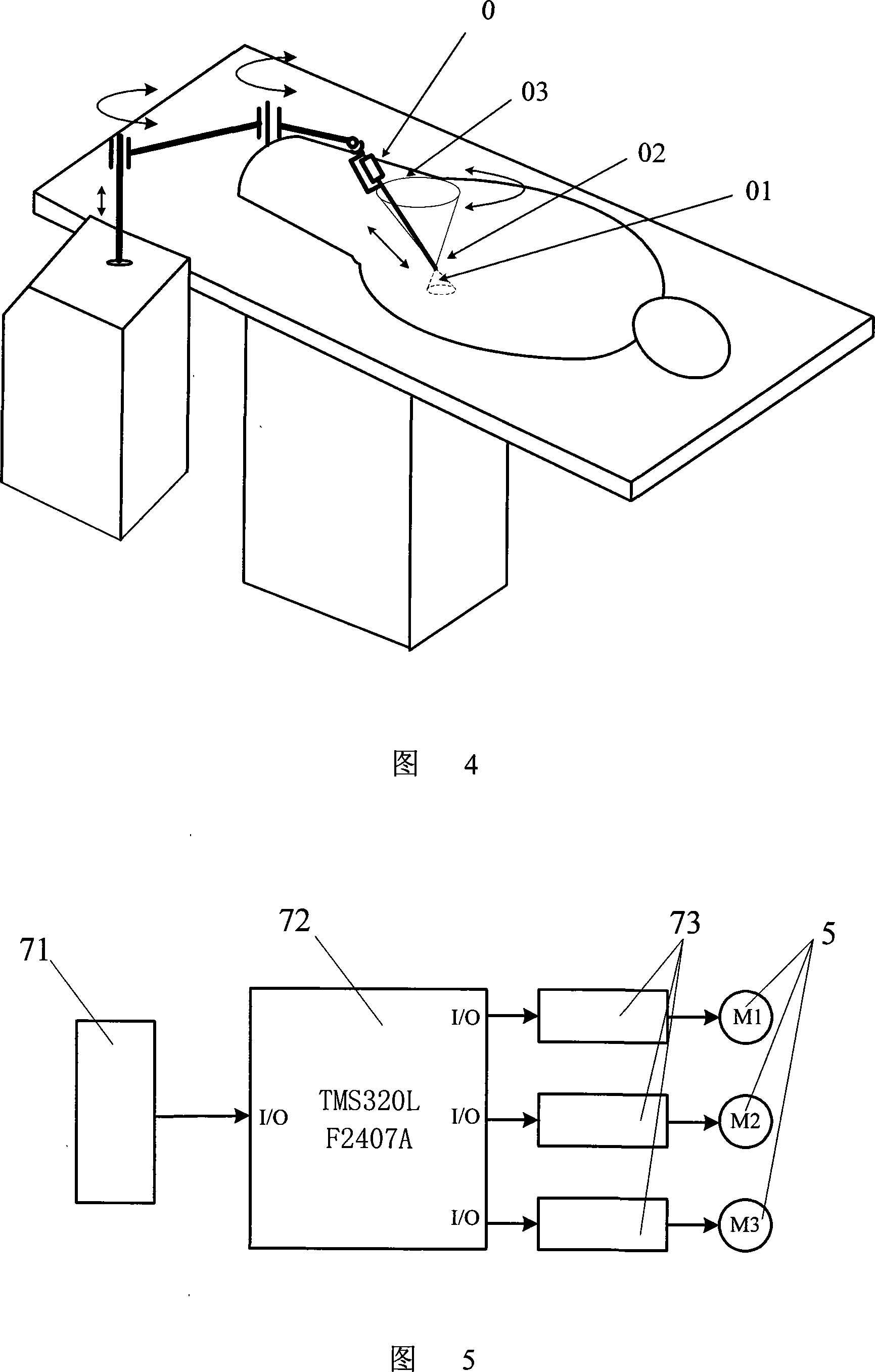
[0029] As shown in Figure 1, the active and passive endoscopic operation surgical robot includes a carrier vehicle 1, a lifting mechanism 2, a large rotating arm 3, a small rotating arm 4, a stepping motor 5, an endoscope clamping device 6 with a ball hinge, and a Control panel 71, DSP digital signal processor 72, the control system 7 that stepper motor driver 73 forms; Wherein, lifting mechanism 2 is screw nut mechanism; The vertical guide rail 23 slides; the nut 24 is fixed on the lower end of the sleeve 21, and the outer end of the screw 25 screwed into the nut 24 is connected with the stepper motor 5; so, driven by the stepper motor 5, the sleeve 21 can move along the The guide rail 23 slides up and down; the large rotating arm 3 is placed on the top of the sleeve 21 horizontally, and is connected with the output shaft of the st...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More