

Module joint location regulating system
A pose adjustment, axial symmetry technology, applied in the system field of mechanical engineering technology, can solve problems such as errors, achieve the effects of fast response, improved accuracy, and not easy to get stuck
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0014] The embodiments of the present invention are described in detail below in conjunction with the accompanying drawings: this embodiment is implemented on the premise of the technical solution of the present invention, and detailed implementation methods and specific operating procedures are provided, but the protection scope of the present invention is not limited to the following the described embodiment.
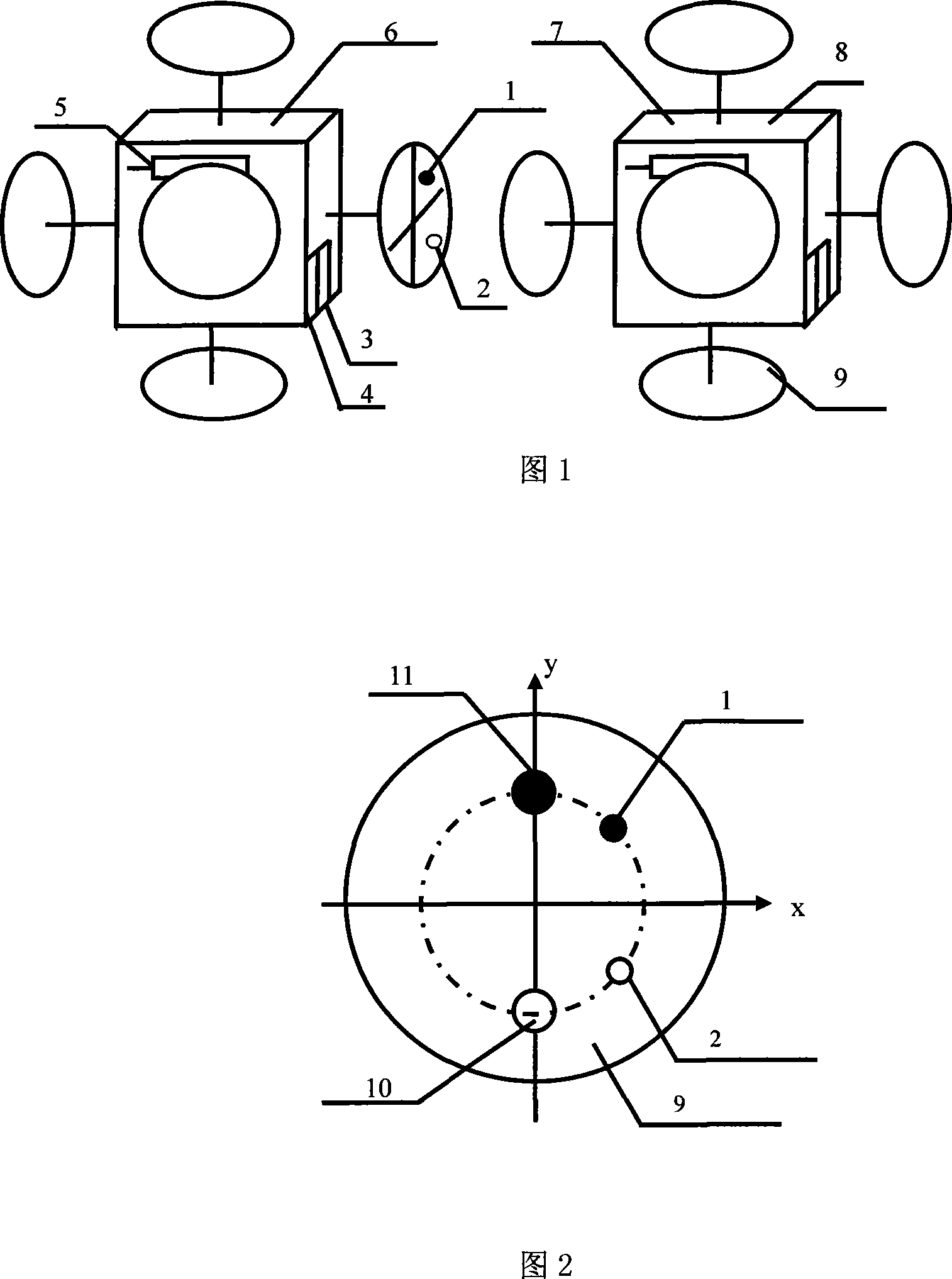
[0015] As shown in FIG. 1 , this embodiment includes: an infrared transmitter 1 , an infrared receiver 2 , an A / D conversion component 3 , an acquisition and processing chip 4 , a motor 5 , a first module 6 , and a second module 7 . Each module comprises a central body 8 , a rotating surface 9 . The connection method is: the flange of the motor 5 is fixed on the shell of the module central body 8 with screws, the central body 8 and the rotating surface 9 are connected by a clutch device, and the infrared transmitter 1 and the infrared receiver 2 are fixed on each modu...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More