

Spherical surface two-freedom symmetrical parallel connection robot mechanism with redundancy drive
A degree of freedom, robot technology, applied in manipulators, manufacturing tools, program-controlled manipulators, etc., can solve the problems of increasing inertia of moving parts, asymmetric distribution of branch drives, etc., and achieve easy layout, good isotropy, stiffness and bearing capacity. high effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
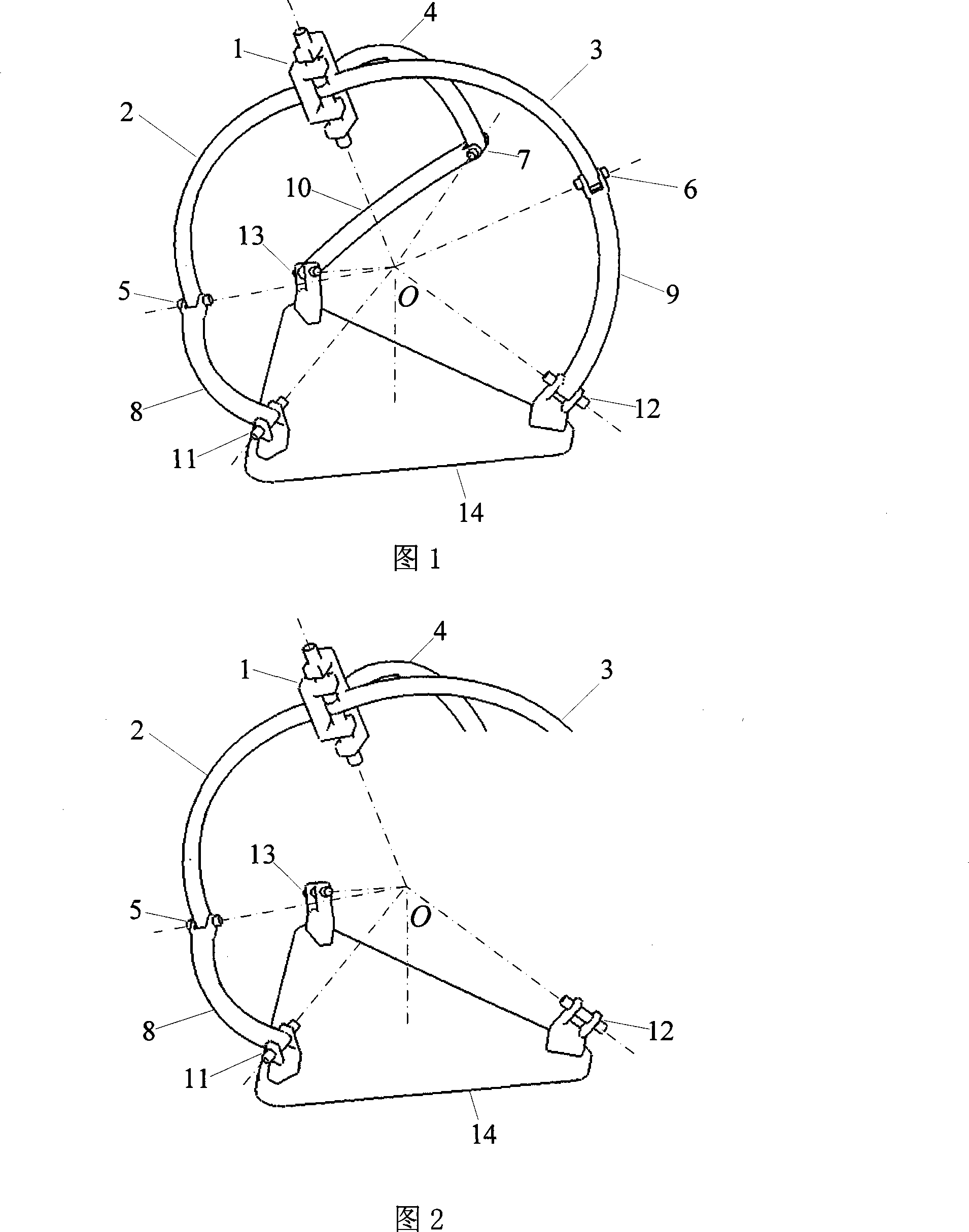
[0012] In the spherical two-degree-of-freedom symmetric parallel robot mechanism with redundant drive, the composite revolving pair 1 is used as the output of the mechanism, and the regular triangular fixed platform 14 is connected with the compound revolving pair 1 through three branches with identical structures. Wherein, the first connecting rod 2, the second connecting rod 3 and the third connecting rod 4 have the same structure; the fourth connecting rod 8, the fifth connecting rod 9 and the sixth connecting rod 10 have the same structure; the first rotating pair 5, The structures of the second rotating pair 6 and the third rotating pair 7 are the same; the structures of the first base rotating pair 11 , the second base rotating pair 12 and the third base rotating pair 13 are the same. In one branch of the mechanism (see Fig. 2), the compound rotary joint 1 connects the first link 2, the second link 3 and the third link 4, and the first rotary joint 5 connects the first li...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More