

Belt wheel changing to holding power under-driven modularization anthropomorphic robot multi-finger hand device
An anthropomorphic robot and underactuated technology, applied in the field of anthropomorphic robots, can solve problems such as inability to rotate independently, excessive difference between hands, and large differences between hands
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0053] The content of the specific structure and working principle of the present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments.
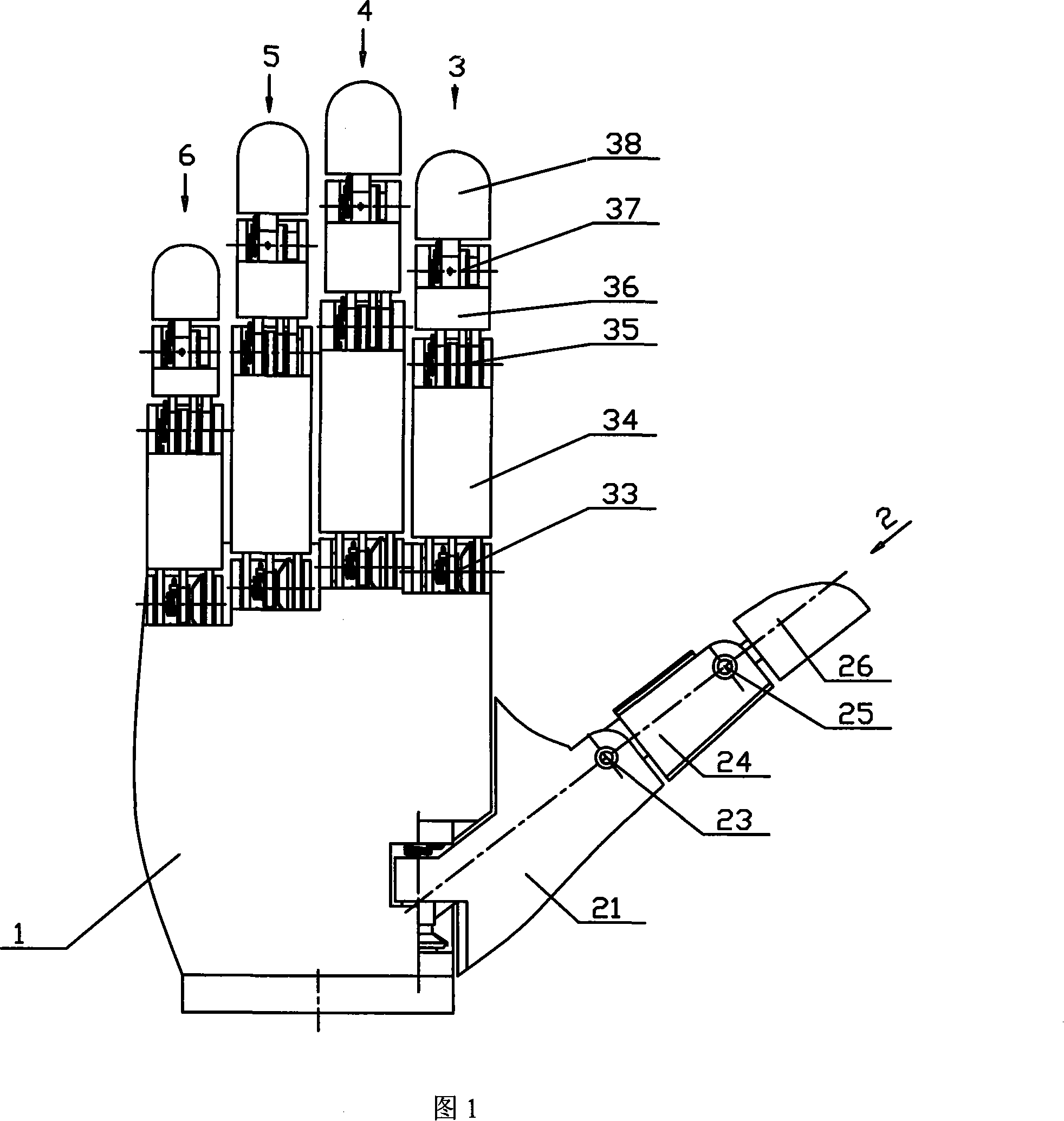
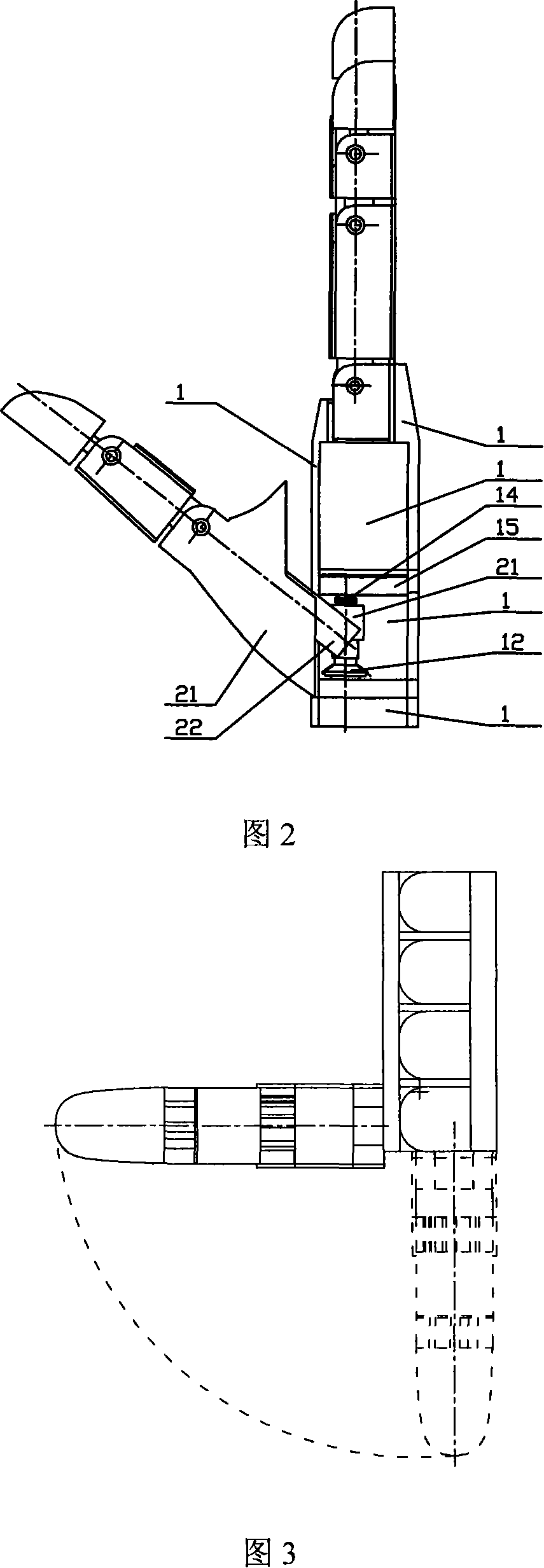
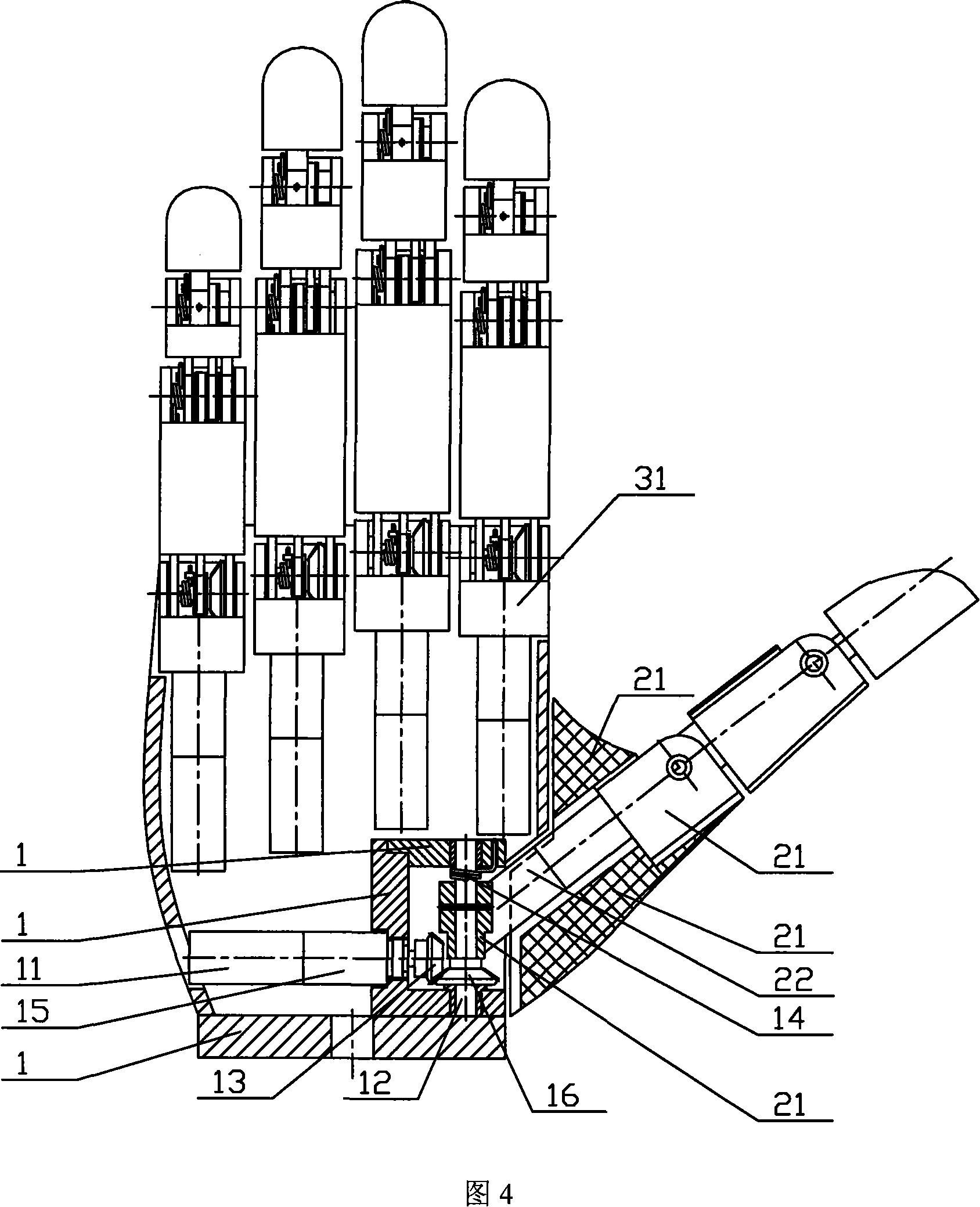
[0054] The appearance of an embodiment of a multi-fingered hand device for an under-actuated modular humanoid robot with variable gripping force designed by the present invention is shown in Fig. 1, Fig. 2 and Fig. 3. Ring finger 5, little finger 6. A partial cross-sectional view of the front of this embodiment is shown in FIG. 4 . The appearance and sectional view of the thumb of this embodiment are shown in Figures 5, 6, 7, 8, and 9 (the thumb base is not completely drawn). The appearance and cross-sectional view of the index finger of this embodiment are shown in Fig. 10, Fig. 11, Fig. 12, Fig. 13, Fig. 14, Fig. 15 and Fig. 16. Figure 17, Figure 18, Figure 19 and Figure 20 are schematic cross-sectional views of several key positions in the process of grasping objects by the in...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More