Control method for hybrid power automobile equipped with two mechanical end motors
A hybrid vehicle, dual mechanical port technology, used in hybrid vehicles, motor vehicles, transportation and packaging
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
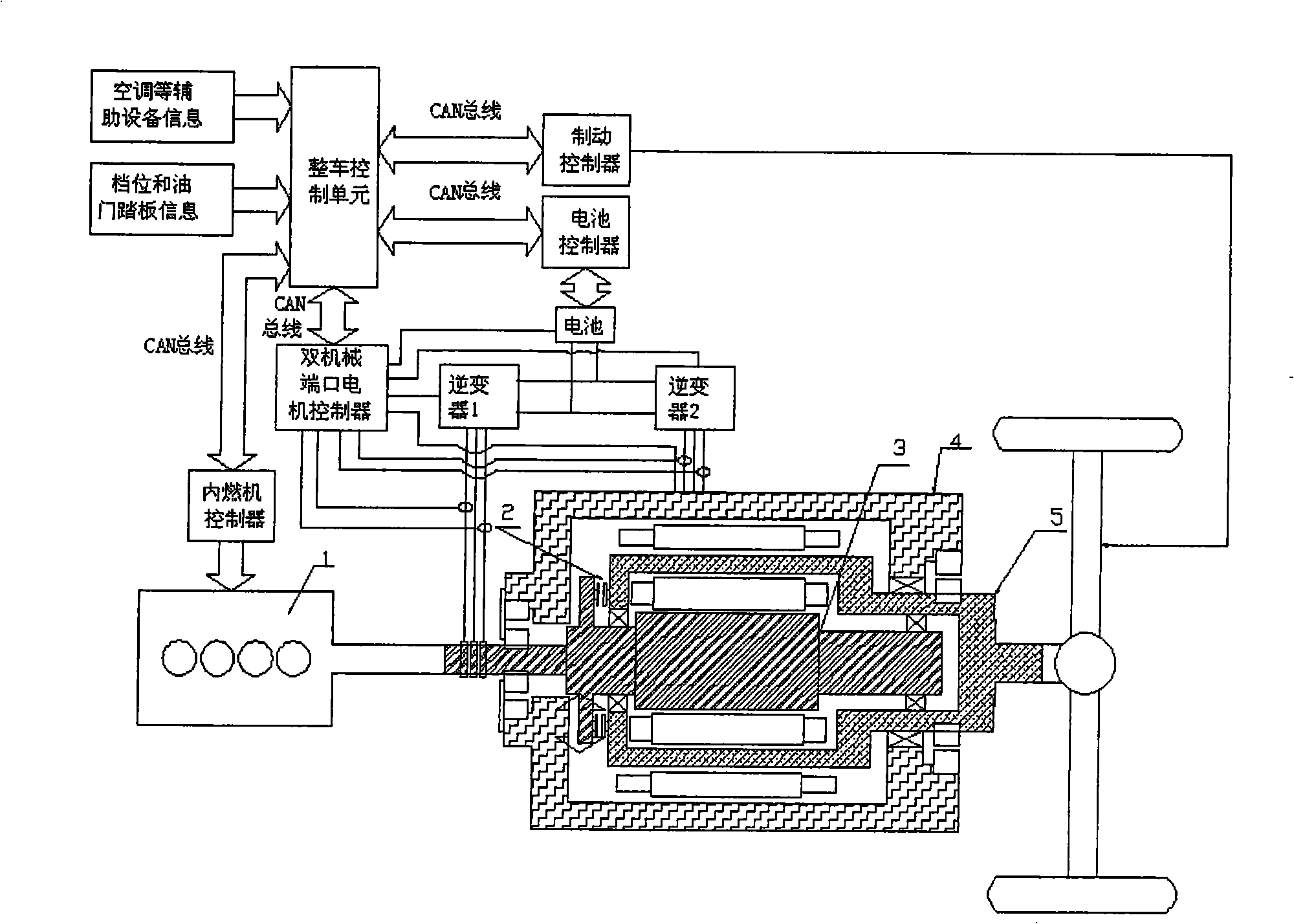
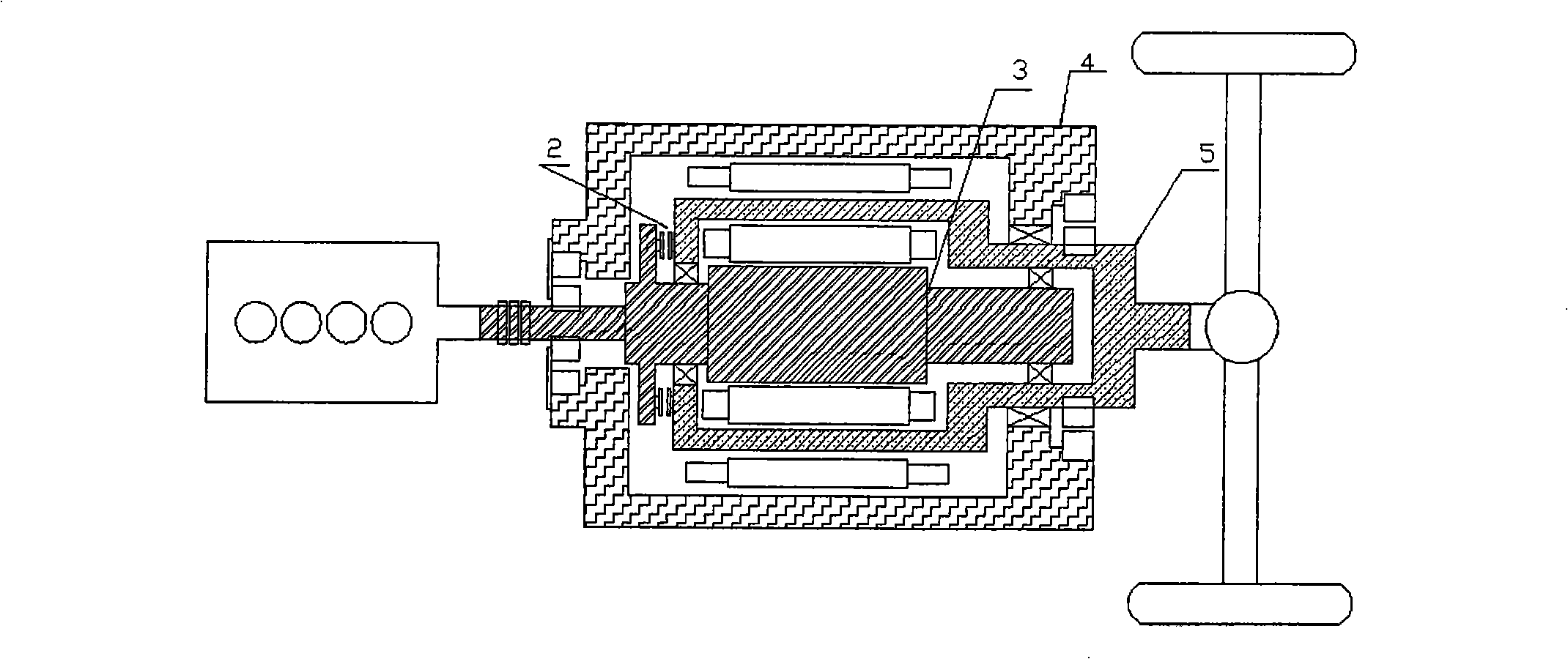
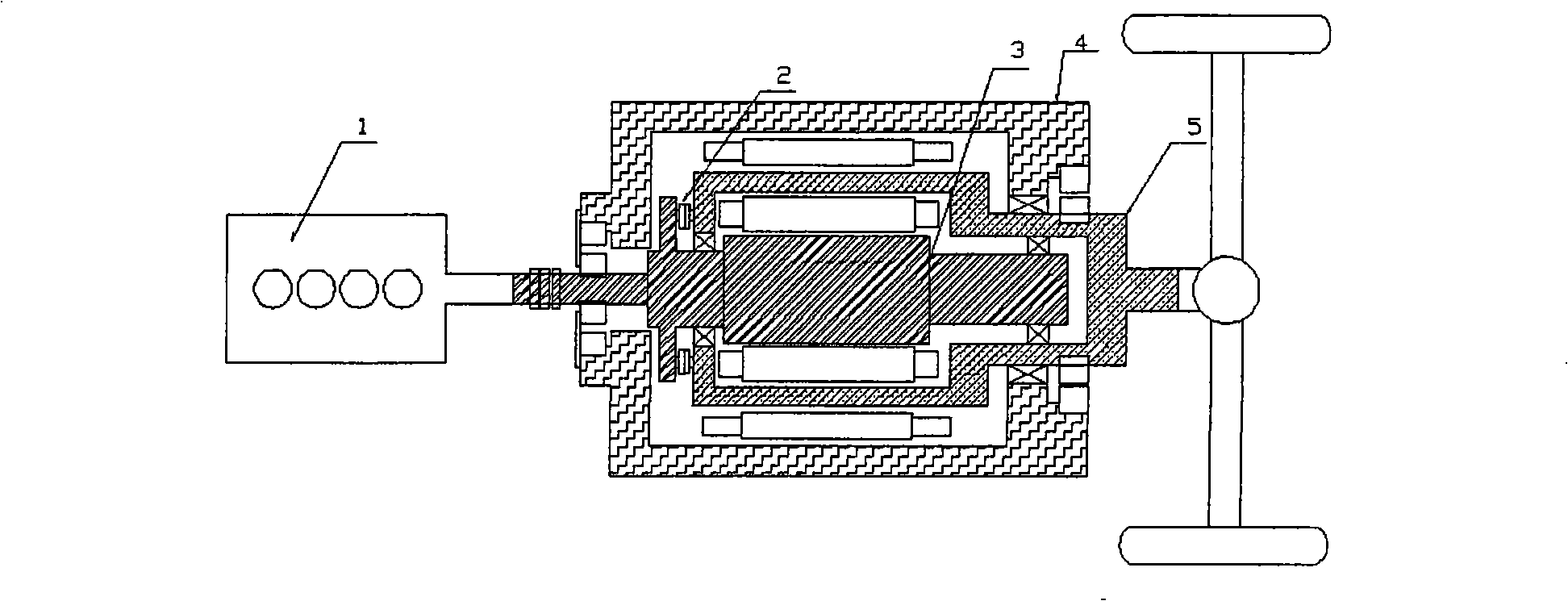
[0041] figure 1 It is the application topological diagram of the double mechanical port motor of the present invention in the hybrid electric vehicle. like figure 1 As shown, a hybrid electric vehicle equipped with a dual mechanical port motor is mainly composed of two parts: the mechanical body and the electrical control. The double mechanical port motor is a three-layer structure arranged concentrically, the outermost layer is the stator 4, the middle is the outer rotor 5, and the innermost layer is the inner rotor 3. Wherein, armature windings are installed on the stator 4 and the inner rotor 3 . The inner rotor current can be passed into the armature winding of the inner rotor 3 from an external power source through brushes and slip rings. The inner rotor is directly connected to the crankshaft of the internal combustion engine 1 and the inner rotor 3 of the dual mechanical port motor, and a clutch 2 is installed between the inner rotor 3 and the outer rotor 5 of the du...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com