

Control method of man machine interaction mechanical arm
A control method and technology of a robotic arm, which can be applied to manipulators, program-controlled manipulators, manufacturing tools, etc., can solve the problems of human accidental injury, inability to model the working environment, etc., and achieve the effects of easy adjustment, high control accuracy, and simple control structure.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
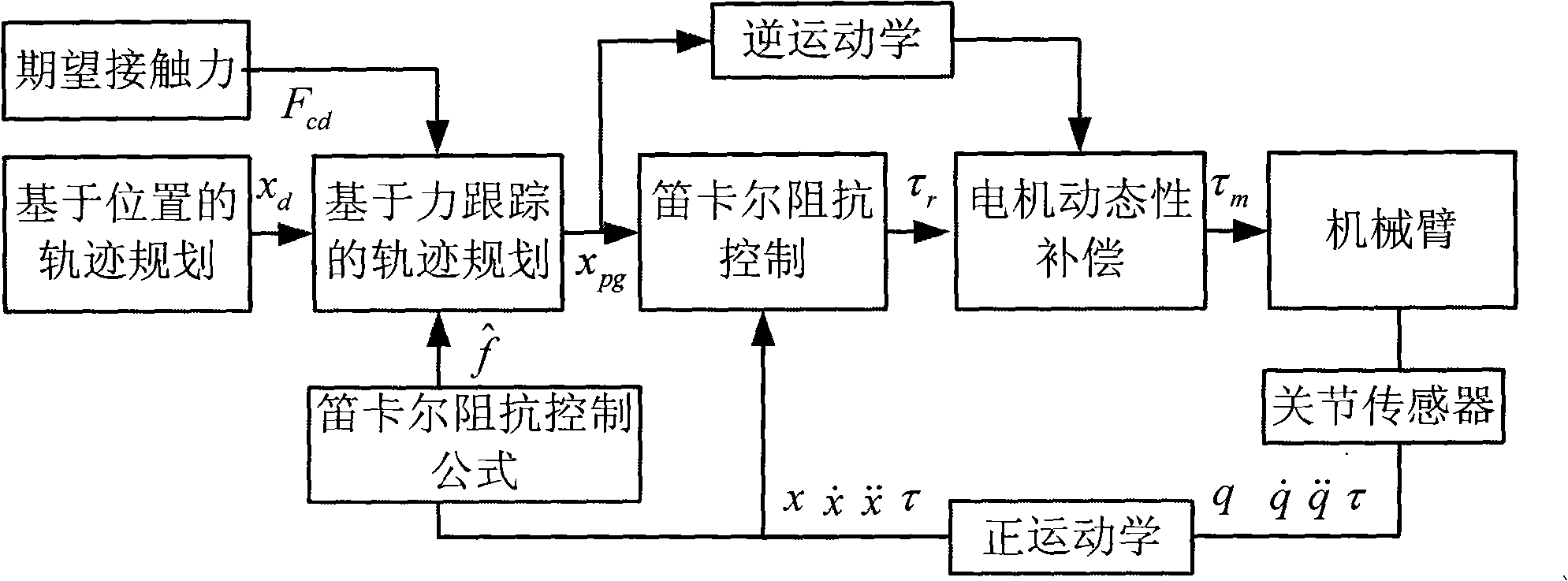
[0007] Specific implementation mode one: combine figure 1 This embodiment is described. This embodiment is completed by the following steps: 1. Accurately calculate the kinematics and dynamics parameters of the manipulator through CAD modeling; d , given the desired contact force F at the end of the manipulator cd and the impedance parameters of the manipulator; 3. The manipulator controller collects the position q and speed of the joint in real time through the joint sensor and acceleration And use the forward kinematics to change the position q and velocity of the joint and acceleration Convert to Cartesian position x, velocity and acceleration And the pre-contact force is calculated according to the Cartesian impedance control formula 4. Calculate the real-time trajectory planning xpg with Cartesian force feedback through trajectory planning based on force tracking; 5. The controller of the manipulator collects the joint torque τ in real time through the joint ...
specific Embodiment approach 2
[0008] Specific embodiment two: the difference between this embodiment and specific embodiment one is: the Cartesian impedance control formula in step three of this embodiment is:
[0009] Λ d x ~ · · + D d x ~ · + K d x ~ = F ext - - - ( 1 )
[0010] in, x ~ = x - x d is the Cartesian spatial position error of the manipulator; x, x d are the actual end point position and the desired position; A d 、D d , and K d is a symmetric po...
specific Embodiment approach 3
[0011] Specific embodiment three: the difference between this embodiment and specific embodiment one or two is: the Cartesian impedance control process described in step five of this embodiment is as follows:
[0012] According to the Lagrangian equation, the dynamic characteristics between the position x of the manipulator and the joint torque τ are expressed as formula (2):
[0013] Λ ( x ) x · · + μ ( x , x · ) x · + J ( q ) - T g ( q ) = J ( q )...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More