

Spherical robot with inside and outside driving
A spherical robot, spherical technology, applied in the field of machinery, to achieve the effect of improving motion performance, achieving low cost, and large range of motion
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
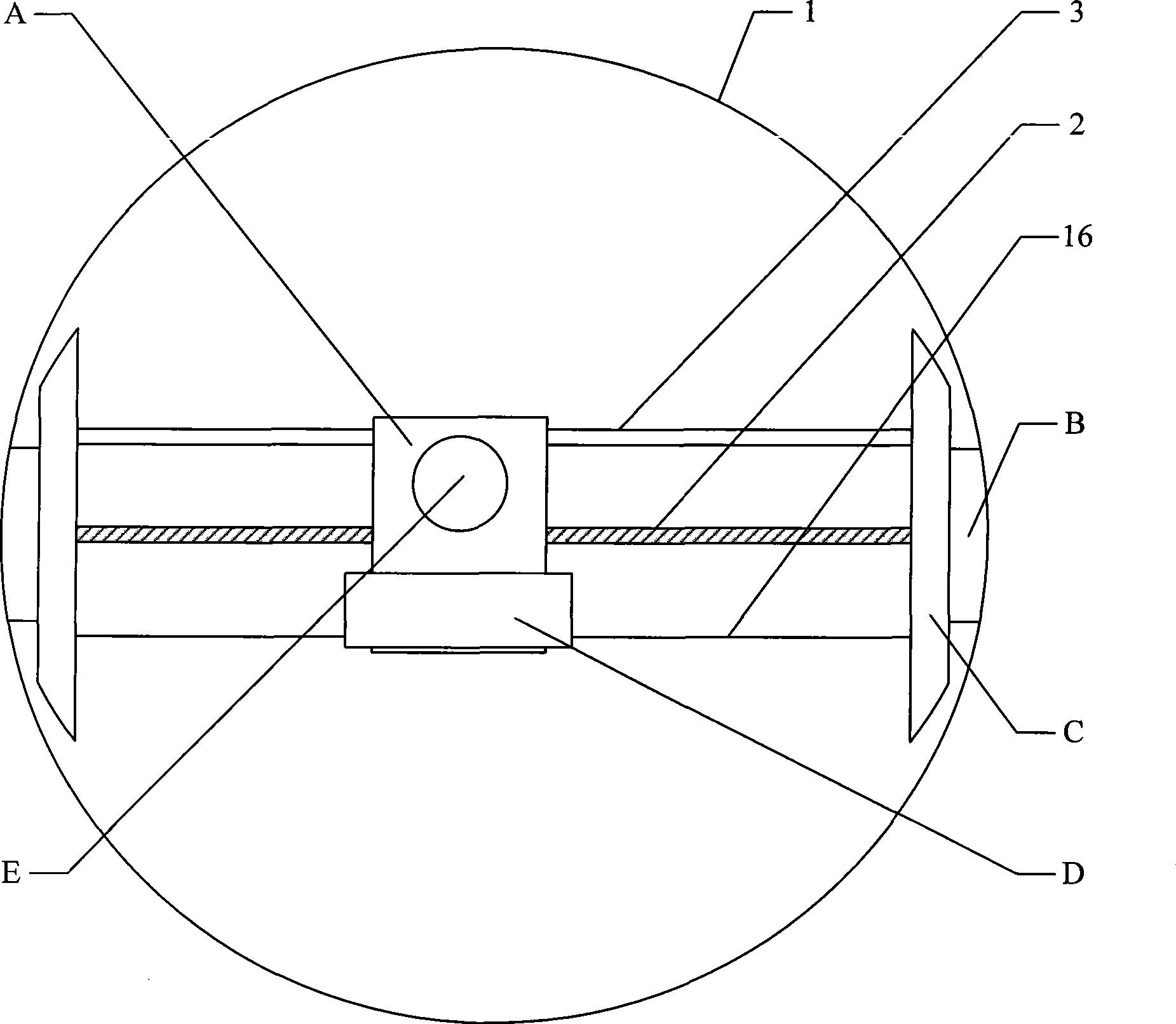
[0021] refer to figure 1 , the present invention is mainly composed of an airbag spherical shell 1, a central axis screw 2, a guide rod 3, an end connection assembly B, a counterweight assembly A, and a solar assembly C. The outer shell adopts the airbag spherical shell 1, and the internal working components include Central axis screw 2, guide rod 3, counterweight assembly A, end coupling assembly B and solar module C, central axis screw 2 and guide rod 3 are fixed in the airbag spherical shell 1 through end coupling assembly B, and the counterweight assembly Part A is threaded on the central axis screw 2 and guide rod 3, the solar module C is fixed on the end connection component B, and the counterweight component A converts the solar energy collected by the solar module C into electric energy, and controls itself to move along the central axis screw 2 moves to drive the airbag spherical shell 1 to roll.
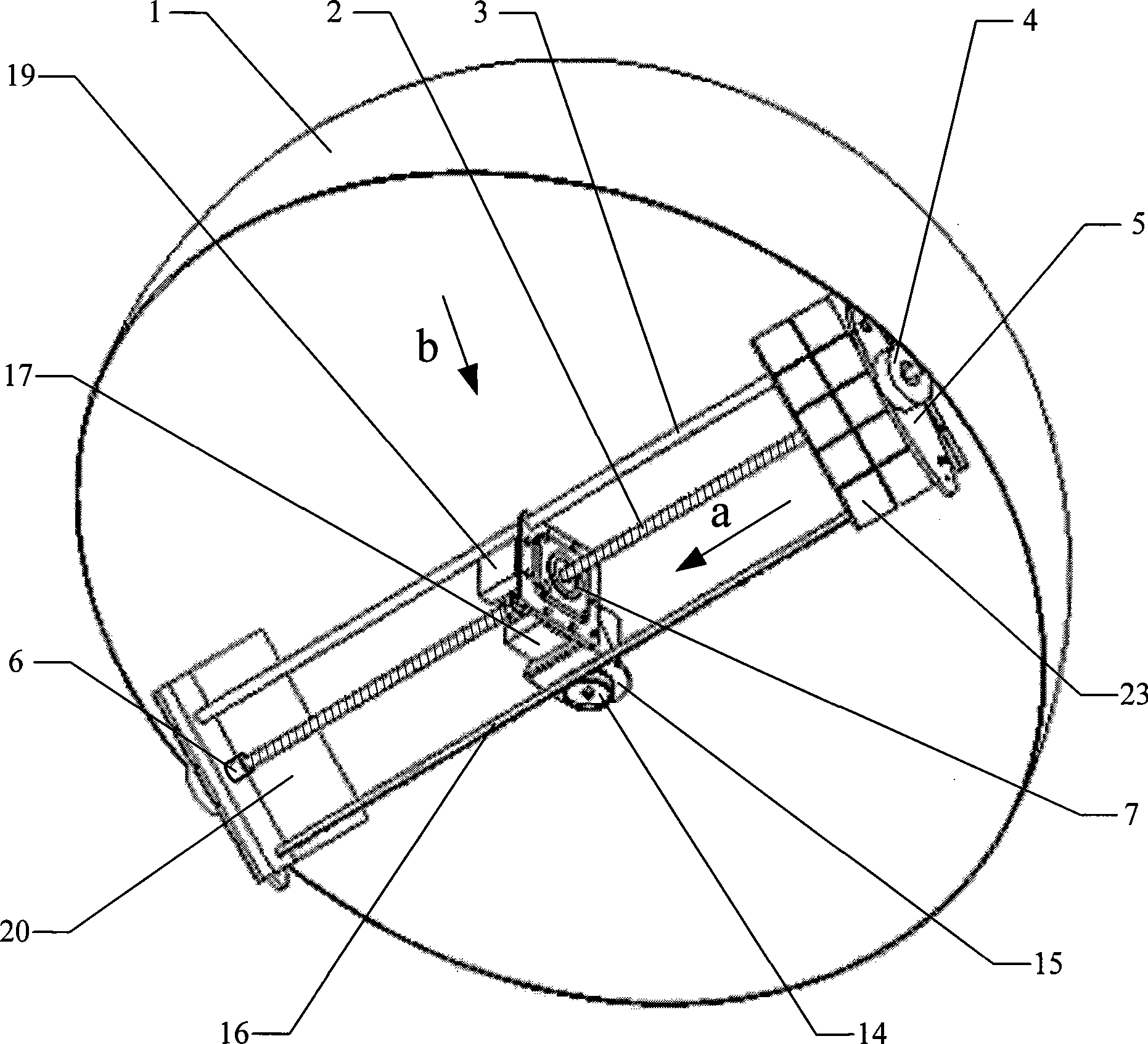
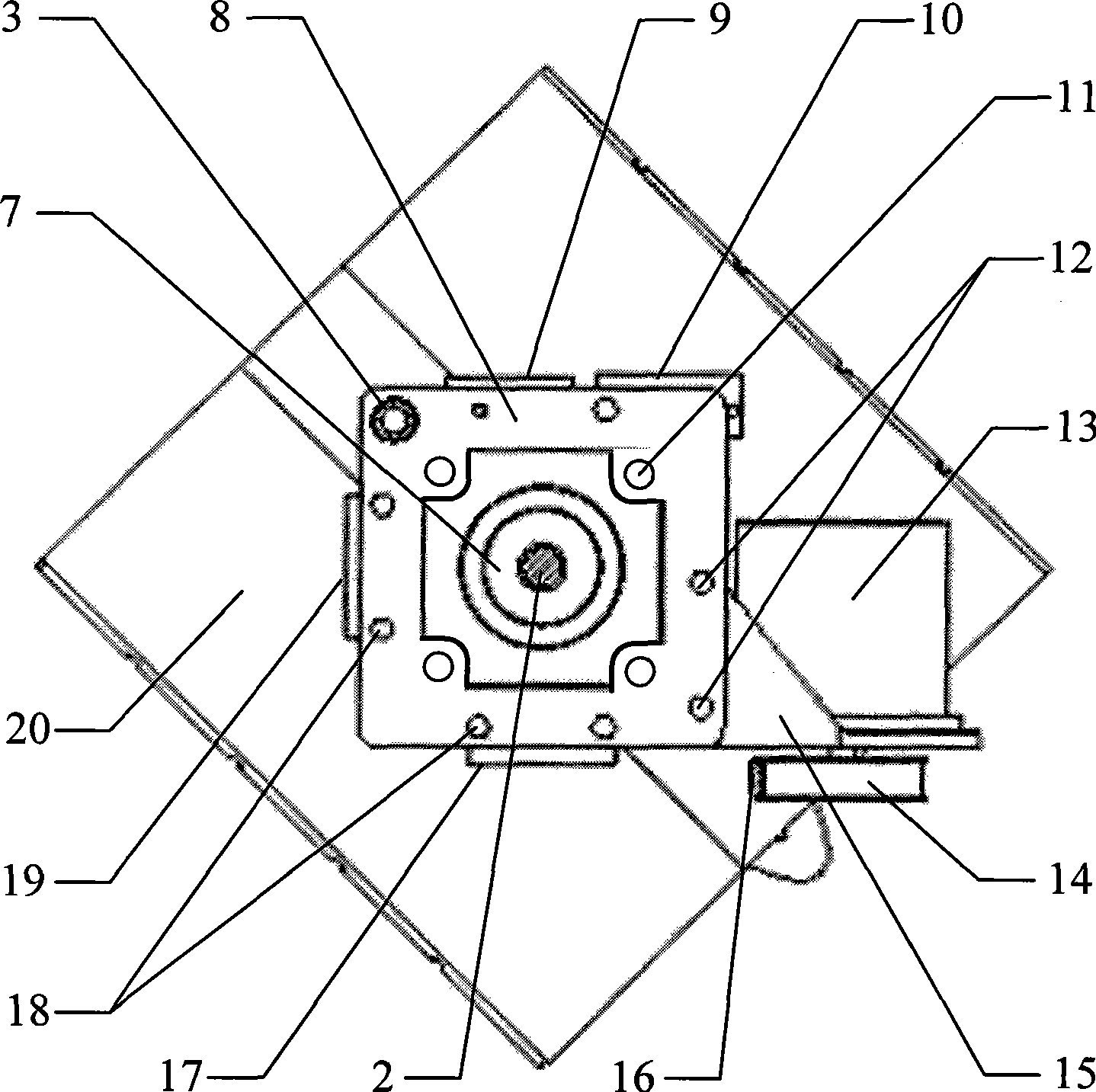
[0022] refer to figure 2 , image 3 and Figure 4 , the detailed ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More