

Spherical robot with inside and outside driving
A spherical robot and spherical technology, applied in the field of machinery, to achieve the effect of simple and practical obstacle crossing/obstacle avoidance, low cost, and simple manufacture and assembly
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
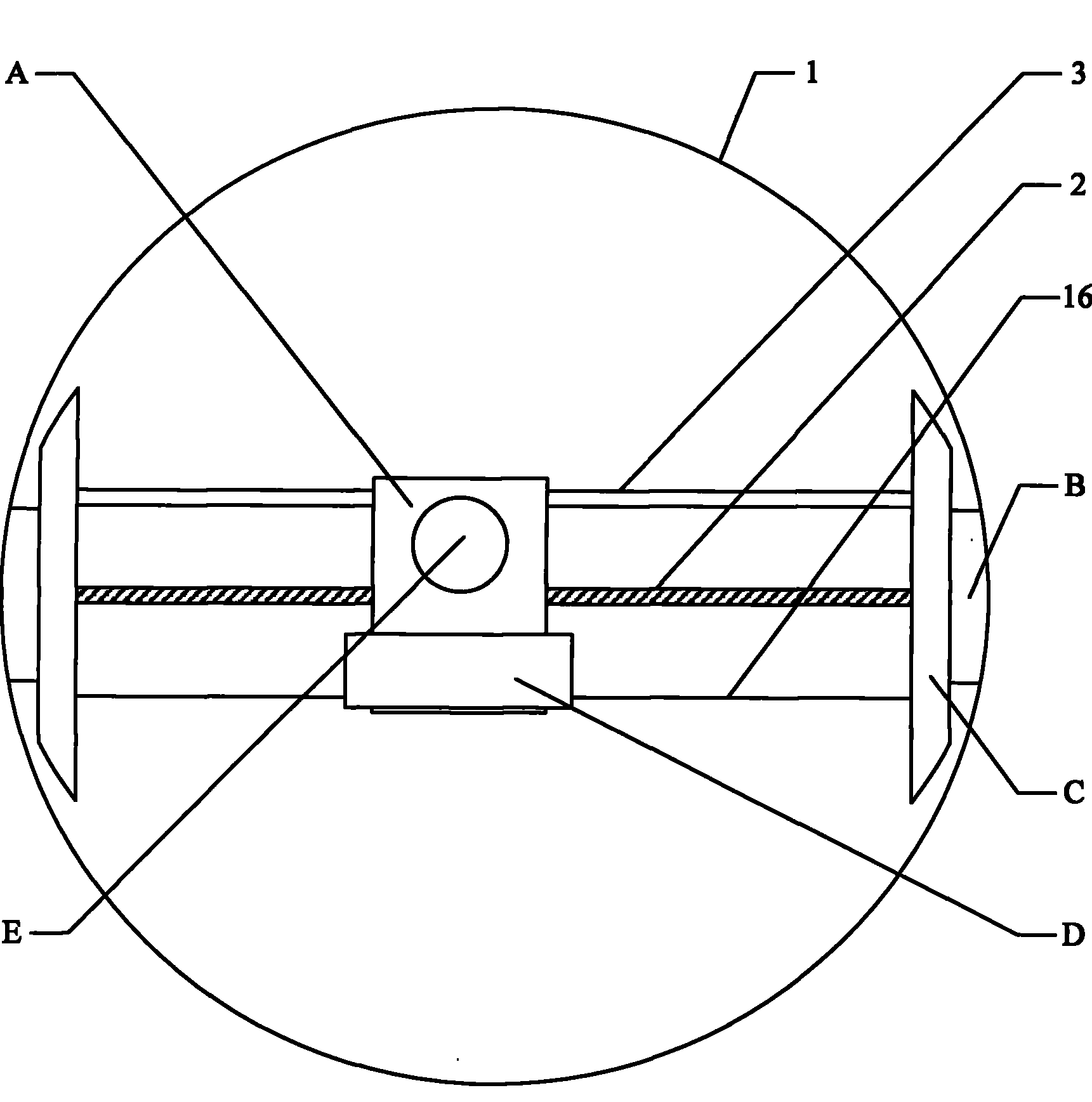
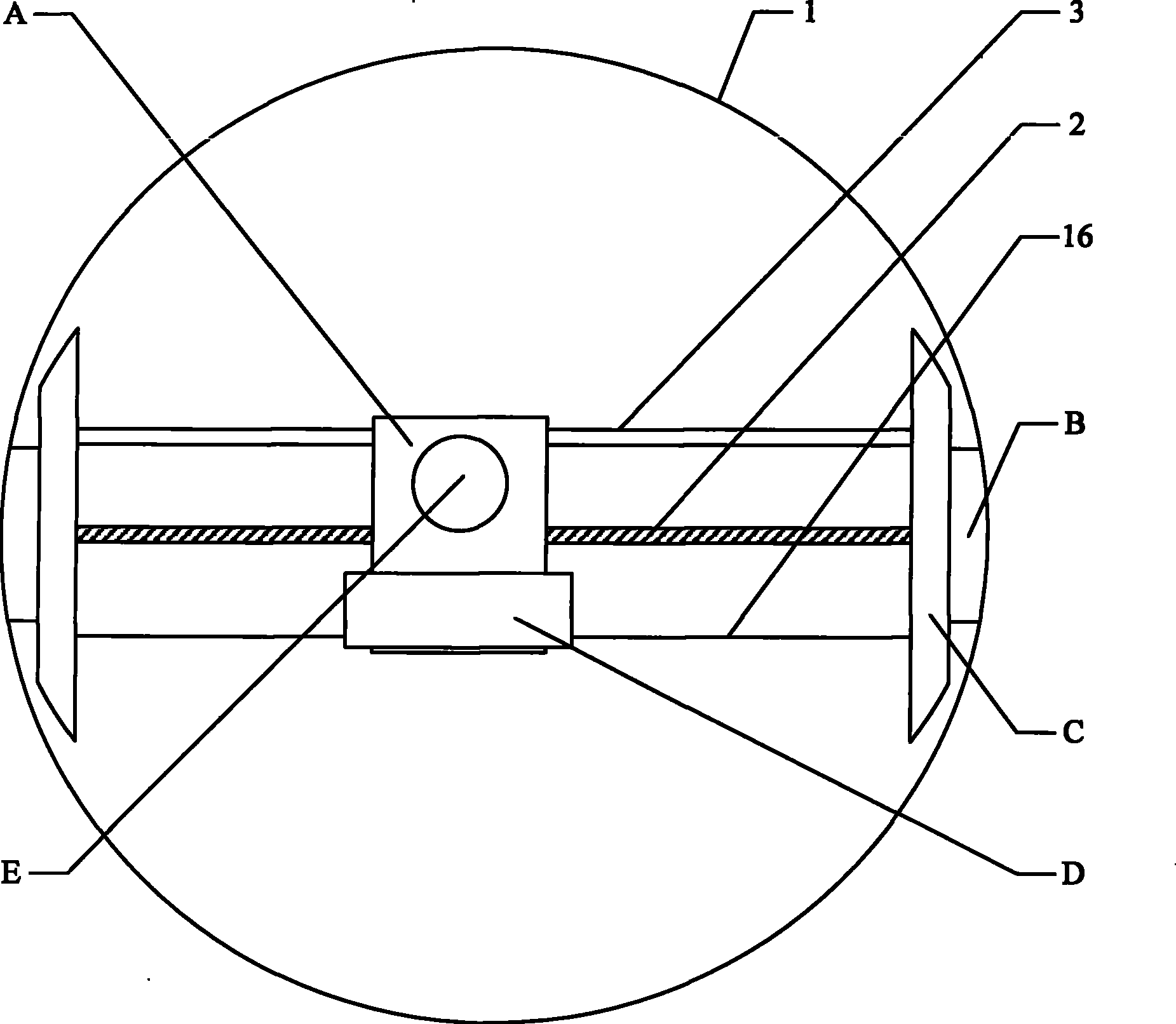
[0021] Referring to Fig. 1, the present invention is mainly composed of an airbag spherical shell 1, a central shaft screw 2, a guide rod 3, an end connection assembly B, a counterweight assembly A and a solar module C, the outer shell adopts the airbag spherical shell 1, and the inner shell The working assembly includes a central axis screw 2, a guide rod 3, a counterweight assembly A, an end coupling assembly B, and a solar assembly C. The central axis screw 2 and the guide rod 3 are fixed in the airbag shell 1 through the end coupling assembly B , the counterweight component A is threaded on the central axis screw 2 and the guide rod 3, the solar component C is fixed on the end connection component B, the counterweight component A converts the solar energy collected by the solar component C into electric energy, and controls itself along the central axis. The shaft screw 2 moves to drive the airbag spherical shell 1 to roll.
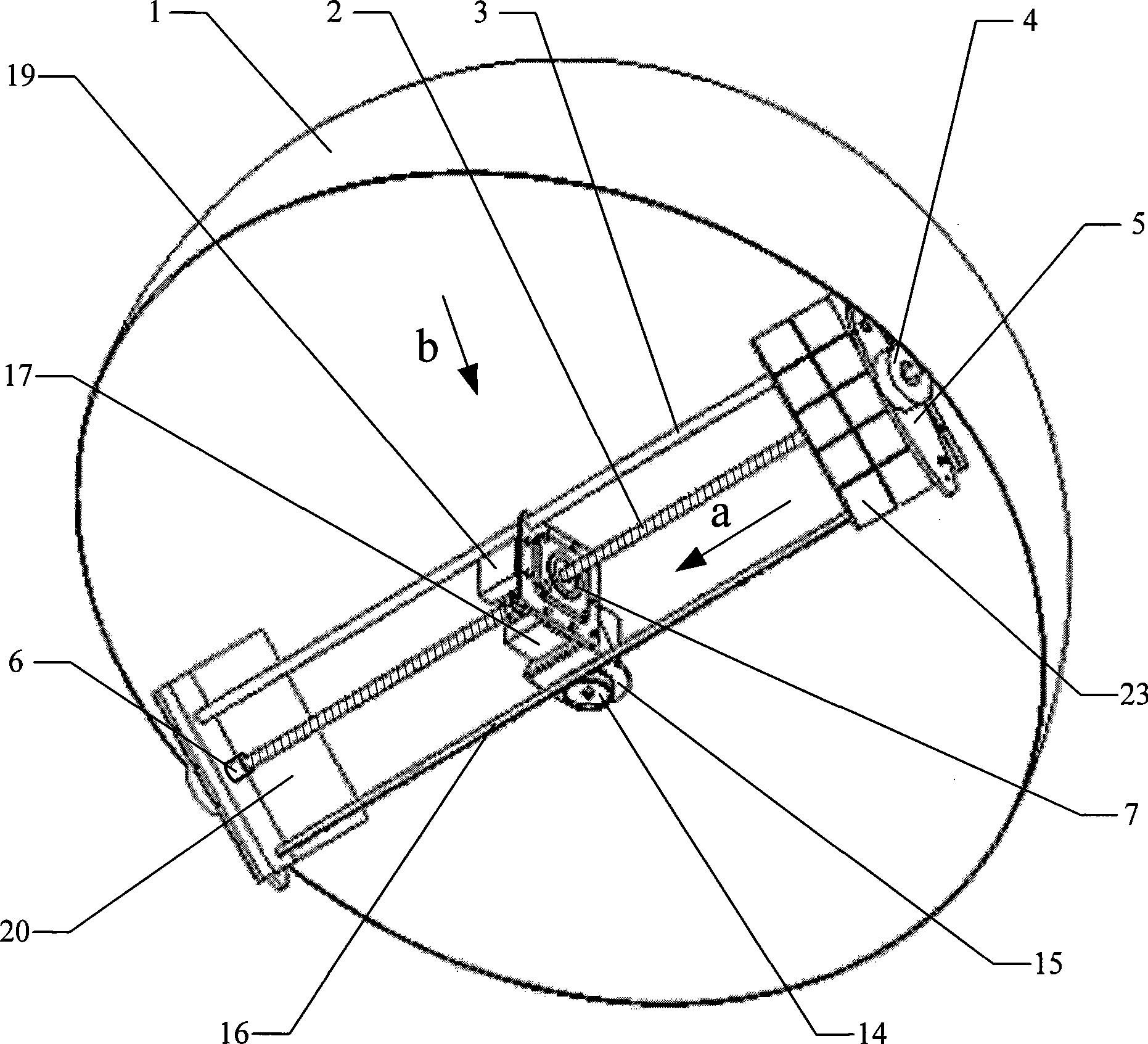
[0022] With reference to Fig. 2, Fig. 3 and Fig...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More