

Underwater robot for ship hull detection
An underwater robot and water detection technology, which is applied in the direction of underwater operation equipment, instruments, measuring devices, etc., can solve the problem of inaccurate magnetic compass data, and achieve the effect of high precision and high transmission rate
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0023] The present invention is described in more detail below in conjunction with accompanying drawing example:
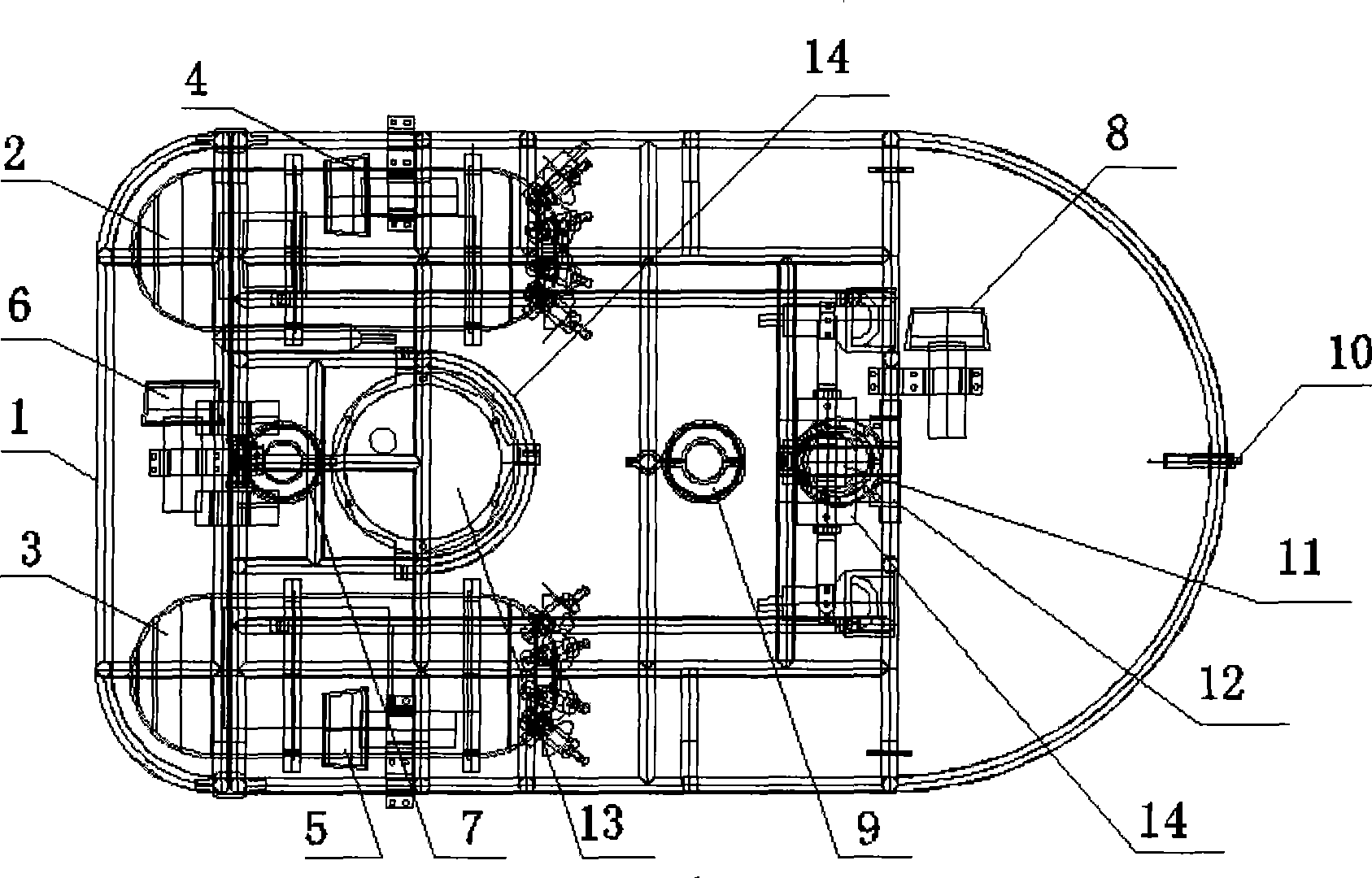
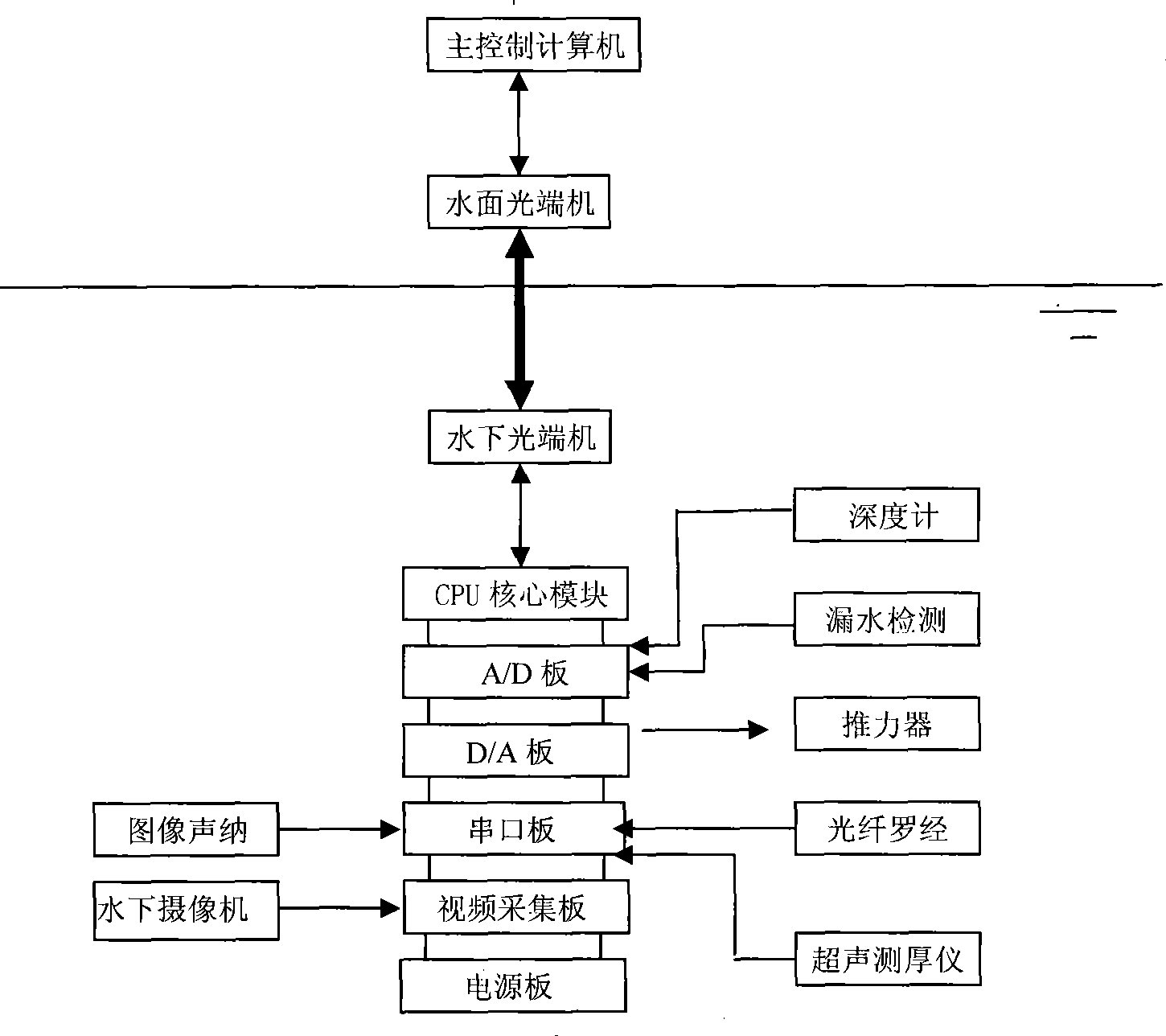
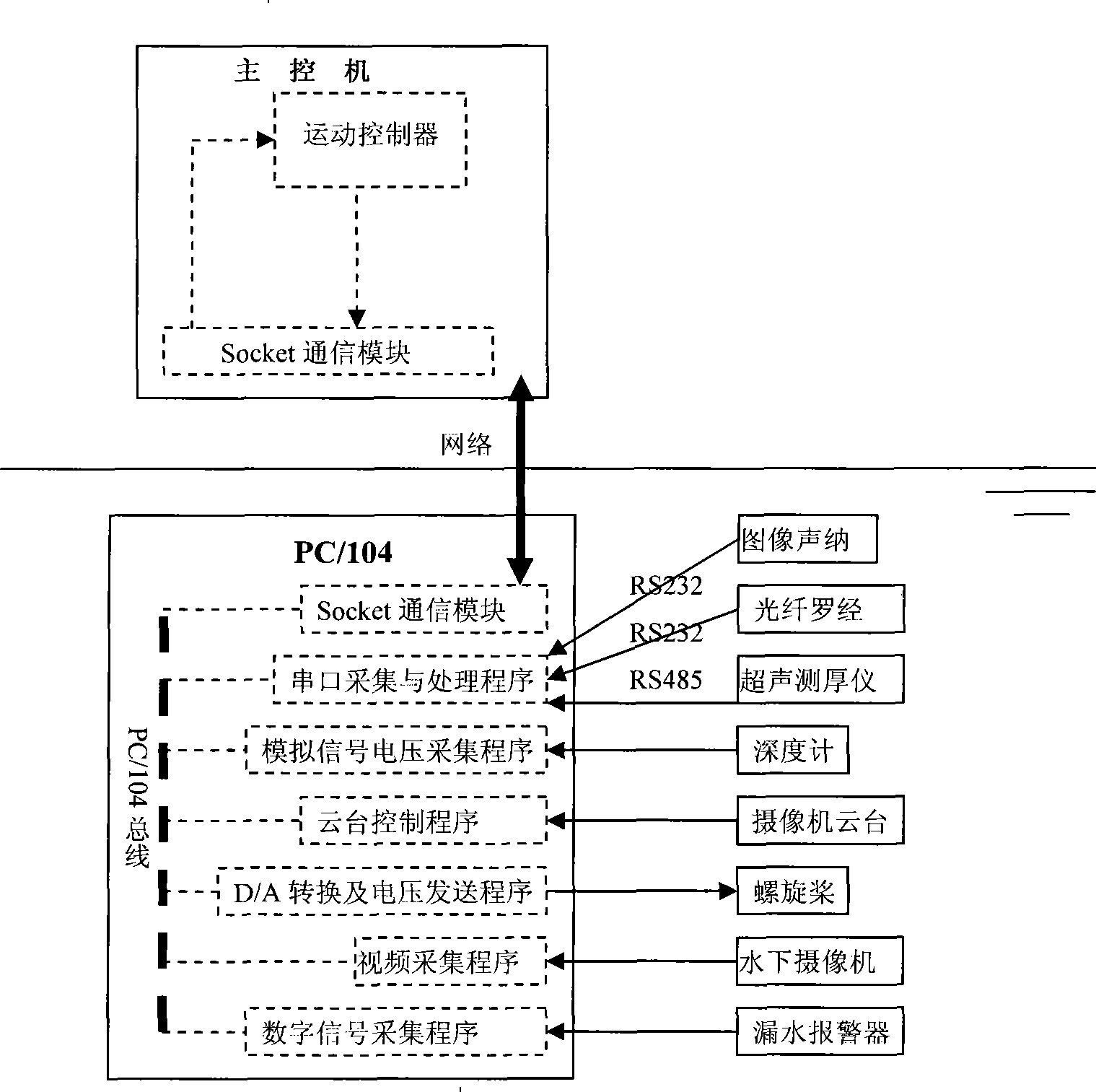
[0024] combine figure 1 and figure 2 , the composition of the hull detection underwater robot includes: frame 1, two left and right pressure chambers 2,3 installed on the frame, left main thrust propeller 4, right main thrust propeller 5, rear side thrust propeller 6, rear vertical thrust propeller 7 1. The main body of the underwater robot consisting of the front side thrust propeller 8 and the front vertical thrust propeller 9 is equipped with environmental sensing equipment, motion sensing equipment and motion execution equipment on the underwater robot main body. The environmental sensing equipment includes an ultrasonic thickness gauge 10. Image sonar 11, underwater low-light camera 12; the motion sensing device includes a fiber optic compass 13 and a depth gauge 14; the motion execution device includes a duct propeller and a three-degree-of-freedom platfor...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More