
Patsnap Eureka
For R&D, Patsnap Eureka makes reading and utilizing patents & technical documents easy.
Patsnap Eureka AIR
Designed for self-driven R&D workflows. Generate viable solutions, solve complex R&D challenges, empower your innovation with AI.

Patsnap Eureka Materials
Designed for material experts only. Revolutionize your material R&D, from search, analyze, to developing new materials.

TechResearch
Generate reliable direction feasibility study reports for your R&D in just a few steps.

TechSeek
Discover and master advanced knowledge NOW. Basics, ideas, possibilities, all at once.

TechMind
As an expert in R&D Theories, TechMind can generates customized viable solutions instantly.

TechRisk
Analyze your overall solution with one click, know your potential R&D risks in advance.

TechMonitor
Get weekly tech updates, stay abreast of the latest tech innovations and key insights.
Magnetic suspension device
A technology of magnetic levitation and suspension, which is applied to the holding device, transportation and packaging, vehicle parts, etc. with magnetic attraction or thrust, which can solve the problems of increased cost, large-scale and complicated device, and reduced accuracy of coil resistance, and achieves reliability improvement. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
no. 1 Embodiment approach
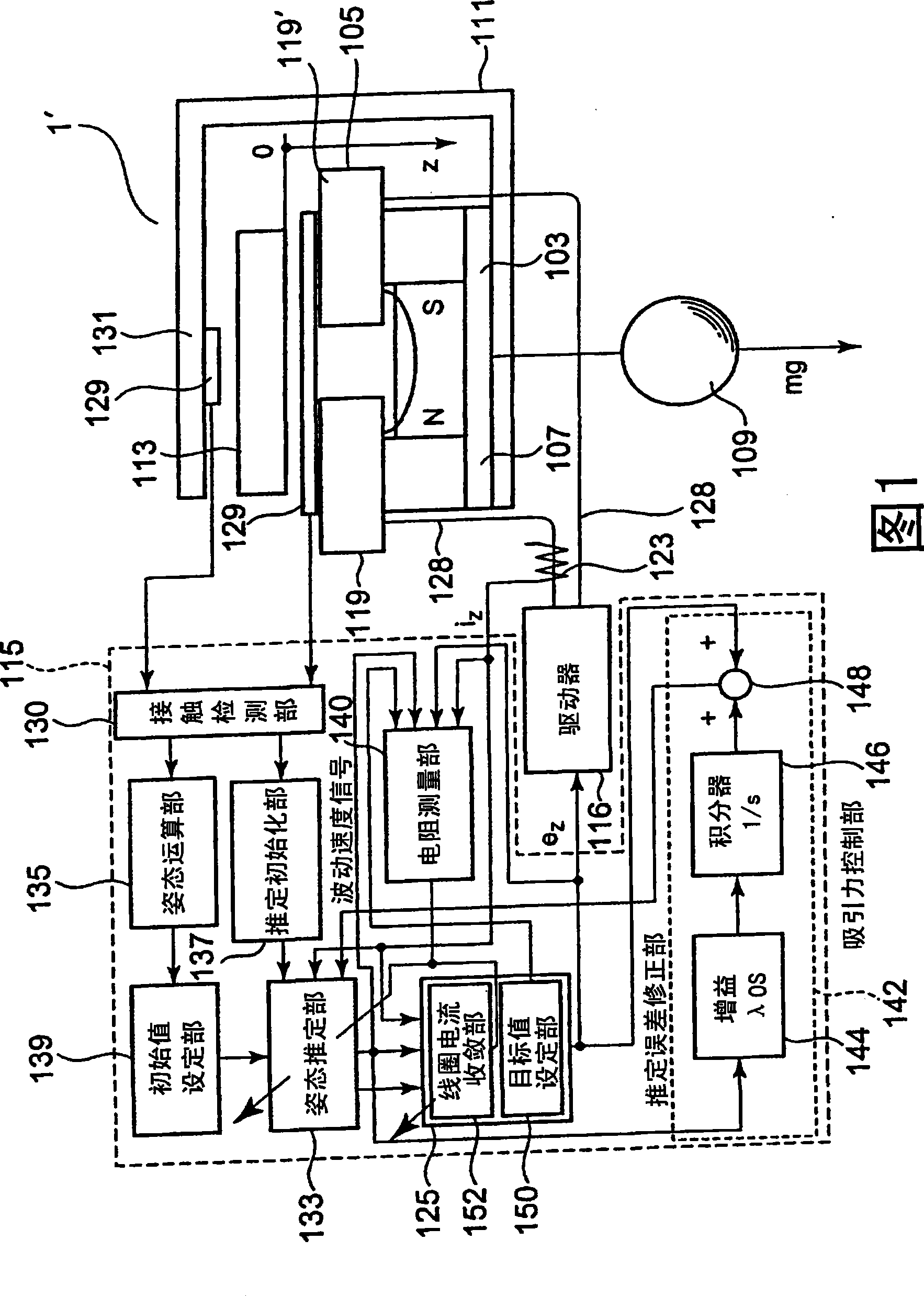
[0137] FIG. 1 is a diagram showing a configuration of a magnetic levitation device according to a first embodiment of the present invention, and the overall configuration is denoted by 1'. In this magnetic levitation device 1', the gap sensor 121 is omitted. Instead, a contact detection unit 130 is provided on the suspension 111 and the vicinity of the suspension 111 . The contact detection unit 130 detects that the suspension 111 changes from the non-contact state to the contact state by using, for example, the piezoelectric rubber 129 .
[0138] In addition, the attractive force control unit 115 includes a posture (posture) estimation unit 133 , a posture calculation unit 135 , an estimation initialization unit 137 , and an initial value setting unit 139 in addition to the contact detection unit 130 described above. The posture estimation unit 133 is based on the excitation current Δi z The mechanism for estimating the levitation gap length deviation Δz and its velocity d(...
no. 2 Embodiment approach
[0322] Next, a second embodiment of the present invention will be described.
[0323] The second embodiment is characterized in that the excitation voltage and the excitation current are calculated for each mode of the motion coordinate system of the floating body. Here, the case where the magnetic levitation device of the present invention is applied to an elevator is taken as an example for description.
[0324] Figure 6 It is a figure which shows the structure of the magnetic levitation apparatus concerning 2nd Embodiment of this invention, and the whole structure at the time of applying this magnetic levitation apparatus to an elevator is shown by the code|symbol 10. also, Figure 7 is a perspective view showing the structure of the frame portion of the magnetic levitation device, Figure 8 It is a perspective view showing the structure around the magnet unit of the magnetic levitation device, Figure 9 It is an elevation view which shows the structure of the magnet un...
no. 3 Embodiment approach
[0411] Next, a third embodiment of the present invention will be described.
[0412] In the above-mentioned first and second embodiments, the magnet unit is installed on the side of the suspension, but this does not limit the installation position of the magnet unit at all. As shown in FIG. 13, the magnet unit may be arranged on the ground side. In addition, in order to simplify description, the same code|symbol will be used for the part common to 1st and 2nd embodiment below.
[0413] FIG. 13 is a diagram showing the configuration of a magnetic levitation device according to a third embodiment of the present invention, and the overall configuration is denoted by reference numeral 300 .
[0414] The magnetic levitation device 300 includes an auxiliary support part 302 , a magnet unit 107 , a guide part 304 , an anti-vibration table table 306 , a linear guide part 308 , a suction force control part 115 , a power amplifier 313 , and a current sensor 123 .
[0415] The auxiliary...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com