Both feet humanoid robot based on passive movement mode
A passive motion and robotic technology, applied in the field of robotics, can solve the problems of large motor output torque, high motor cost, and motor wear, and achieve reasonable motion and good compression resistance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0016] The structure of the present invention will be described in detail below through embodiments and in conjunction with the accompanying drawings.
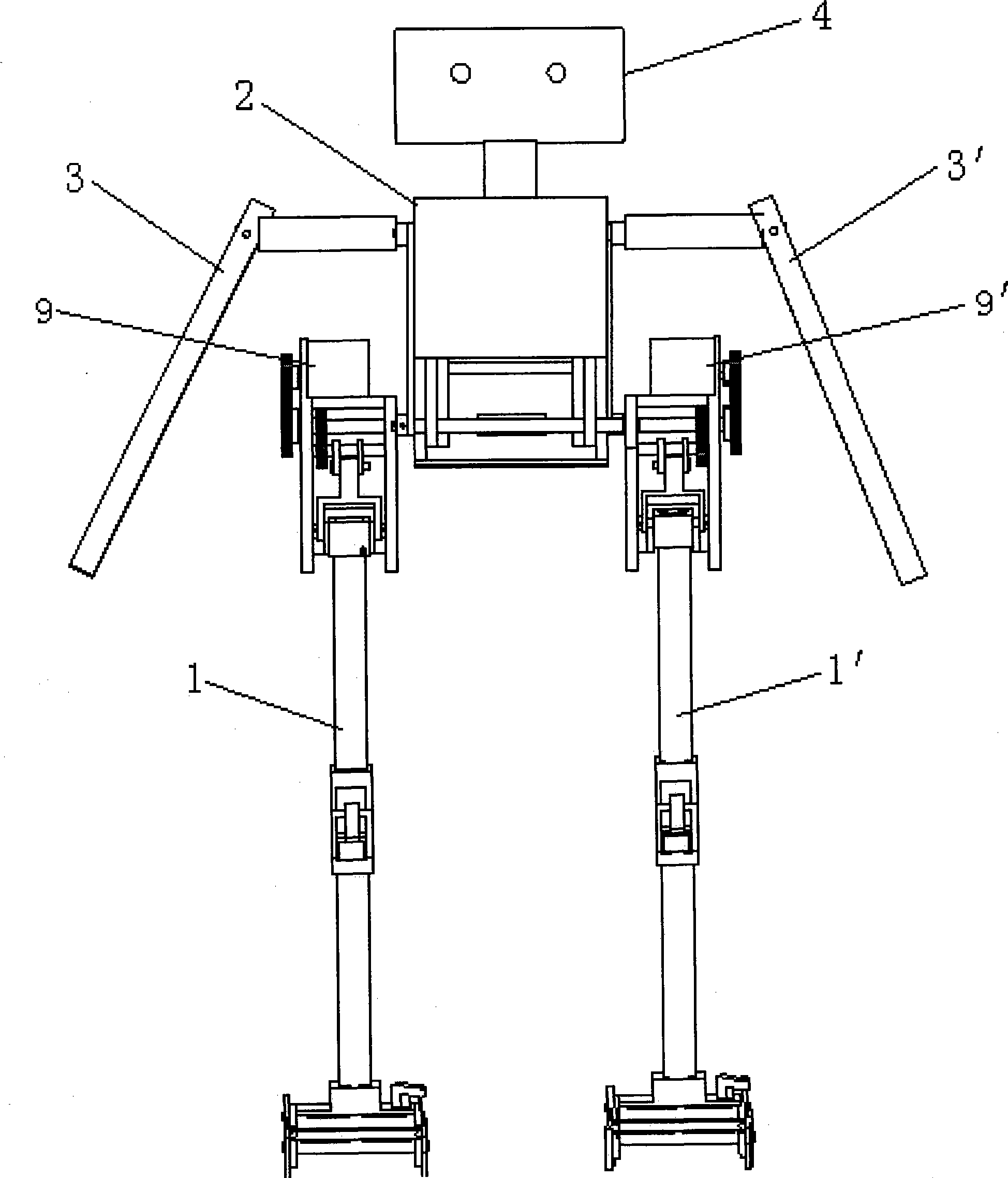
[0017] like figure 1 As shown, the present invention includes left and right bionic elastic mechanical legs 1, 1' (patent applied for separately, application number: 2007101201578), transmission trunk 2, left and right mechanical arms 3, 3' and mechanical head 4.
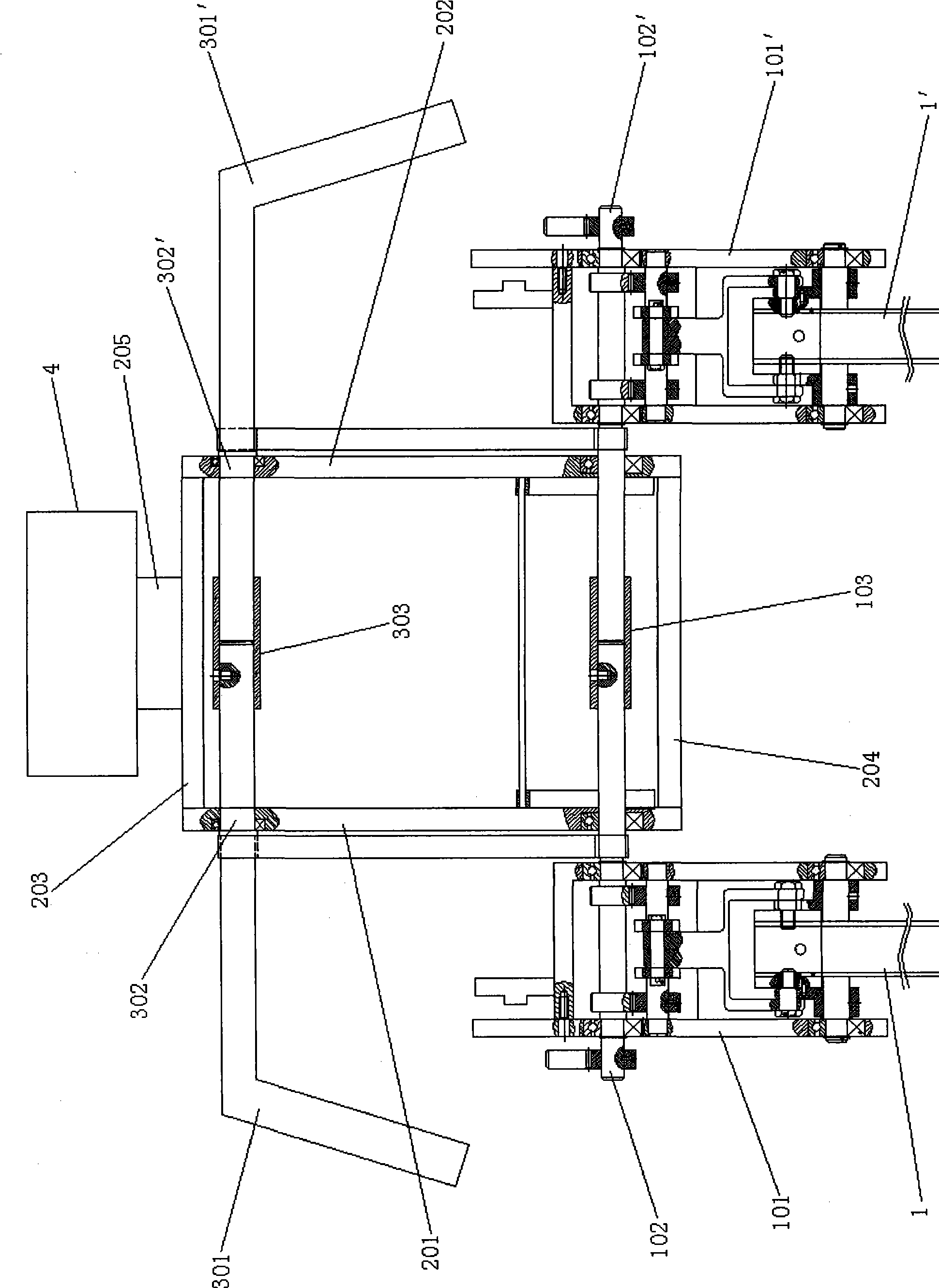
[0018] like figure 2 As shown, the transmission trunk 2 is surrounded by left and right trunk fixing frames 201, 202 and upper and lower trunk connecting frames 203, 204 fixedly connected. Mechanical head 4 is fixedly connected with upper trunk connecting frame 203 by neck 205, and mechanical head 4 can not rotate, and only plays a decorative role at present. The left and right hip shells 101, 101' of the left and right bionic elastic mechanical legs 1, 1' are respectively connected to one end of the left and right hip half shafts 102, 102', and the left and righ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More